

授权公布号:CN107198848B
一种能攀爬越障的消防灭火机器人
有效
申请
2017-07-20
申请公布
2017-09-26
授权
2023-05-26
预估到期
2037-07-20
| 申请号 | CN201710597355.7 |
| 申请日 | 2017-07-20 |
| 申请公布号 | CN107198848A |
| 申请公布日 | 2017-09-26 |
| 授权公布号 | CN107198848B |
| 授权公告日 | 2023-05-26 |
| 分类号 | A62C27/00;B62D55/08 |
| 分类 | 救生;消防; |
| 申请人名称 | 上海格拉曼国际消防装备有限公司 |
| 申请人地址 | 上海市松江区北内路32号 |
专利法律状态
2023-05-26
授权
状态信息
授权
2017-10-27
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):A62C27/00;申请日:20170720
2017-09-26
公布
状态信息
公布
摘要
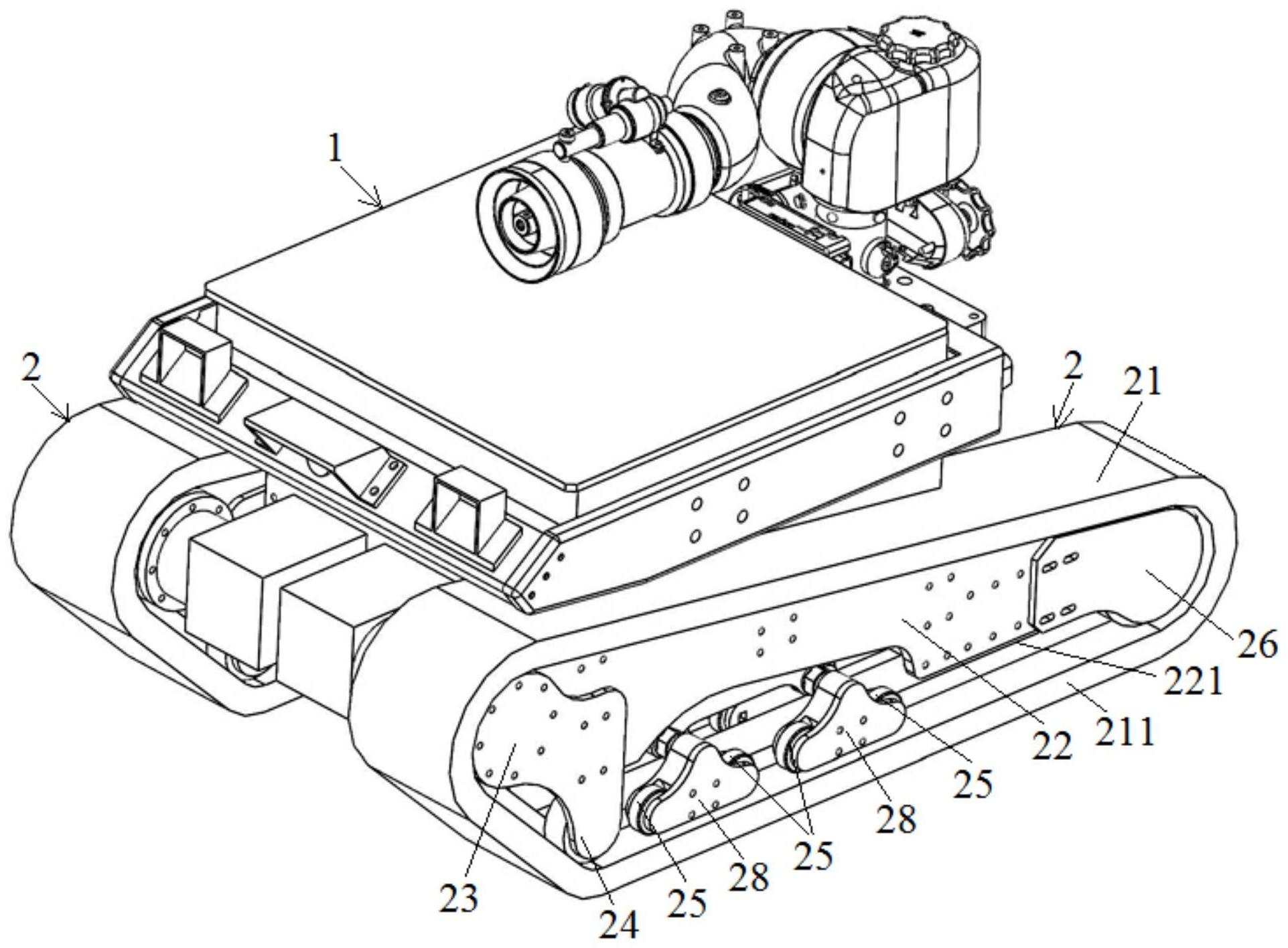
本发明公开了一种能攀爬越障的消防灭火机器人,包括消防灭火机器人本体和两个对称设置的履带行走机构,所述履带行走机构包括固定在消防灭火机器人本体底部的履带梁、位于履带梁前端的驱动轮、位于履带梁后端的张紧轮、位于驱动轮与张紧轮之间的固定式支重轮和浮动式支重轮,且固定式支重轮与浮动式支重轮和张紧轮处于同一接地平面上,固定式支重轮的重心与最后方浮动式支重轮的重心之间的距离占接地履带长度的40%~70%,履带围绕驱动轮、张紧轮、浮动式支重轮和固定式支重轮形成钝角朝上的钝角三角形结构,所述钝角的顶点为固定式支重轮,以及介于浮动式支重轮后部、张紧轮前部之间的履带梁悬空于接地履带。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有