

授权公布号:CN117047787B
基于双目结构光视觉的水轮机顶盖在位机器人编程方法
有效
申请
2023-10-13
申请公布
2023-11-14
授权
2023-12-29
预估到期
2043-10-13
| 申请号 | CN202311323503.8 |
| 申请日 | 2023-10-13 |
| 申请公布号 | CN117047787A |
| 申请公布日 | 2023-11-14 |
| 授权公布号 | CN117047787B |
| 授权公告日 | 2023-12-29 |
| 分类号 | B25J9/16;G06T7/246;G06T7/73;G06T7/80 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 中国长江电力股份有限公司 |
| 申请人地址 | 湖北省武汉市江岸区三阳路88号三阳中心 |
专利法律状态
2023-12-29
授权
状态信息
授权
2023-12-01
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20231013
2023-11-14
公布
状态信息
公布
摘要
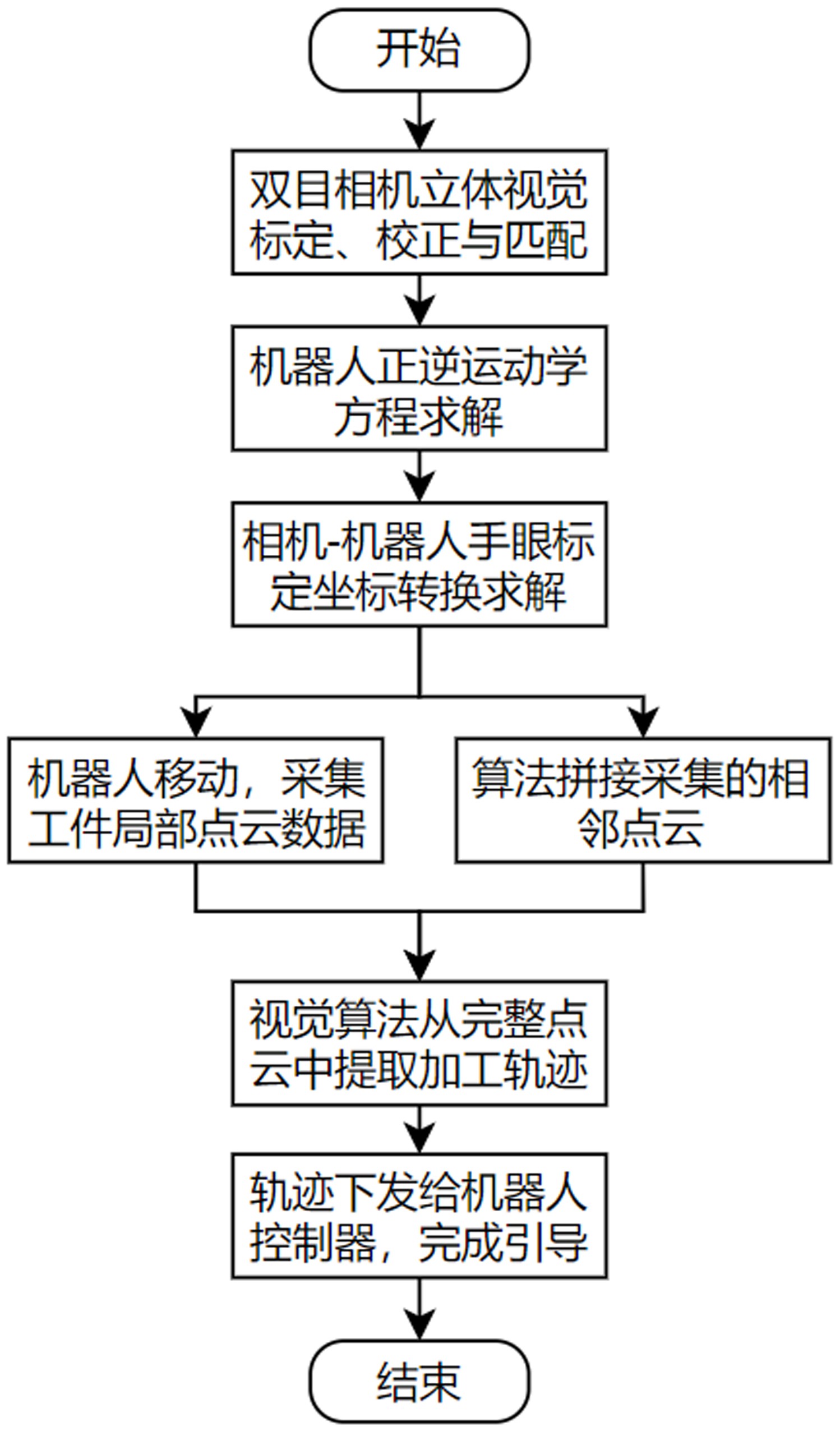
本发明公开了一种基于双目结构光视觉的水轮机顶盖在位机器人编程方法,属于机器人视觉引导智能加工技术领域;方案首先进行双目结构光相机与机器人的手眼标定建立双目相机与机械臂的坐标转换关系,然后通过双目相机采集大型水轮机顶盖的圆环形待加工局部区域进行拼接,最后,通过点云处理算法完成轨迹提取和机器人轨迹规划,从而实现在双目视觉引导下的水轮机顶盖在位机器人快速编程。本发明所提出的方法能够适应多种尺寸的水轮机顶盖加工修复,且兼顾实时性与鲁棒性,不确定性因素对系统的影响极大弱化,具有智能化、系统化程度高。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有