

授权公布号:CN117103280B
一种大型水轮机顶盖在位机器人减材加工方法及系统
有效
申请
2023-10-19
申请公布
2023-11-24
授权
2023-12-22
预估到期
2043-10-19
| 申请号 | CN202311352229.7 |
| 申请日 | 2023-10-19 |
| 申请公布号 | CN117103280A |
| 申请公布日 | 2023-11-24 |
| 授权公布号 | CN117103280B |
| 授权公告日 | 2023-12-22 |
| 分类号 | B25J9/16;B23C3/00;B25J11/00;B25J19/02;B25J19/04 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 中国长江电力股份有限公司 |
| 申请人地址 | 湖北省武汉市江岸区三阳路88号三阳中心 |
专利法律状态
2023-12-22
授权
状态信息
授权
2023-11-24
公布
状态信息
公布
摘要
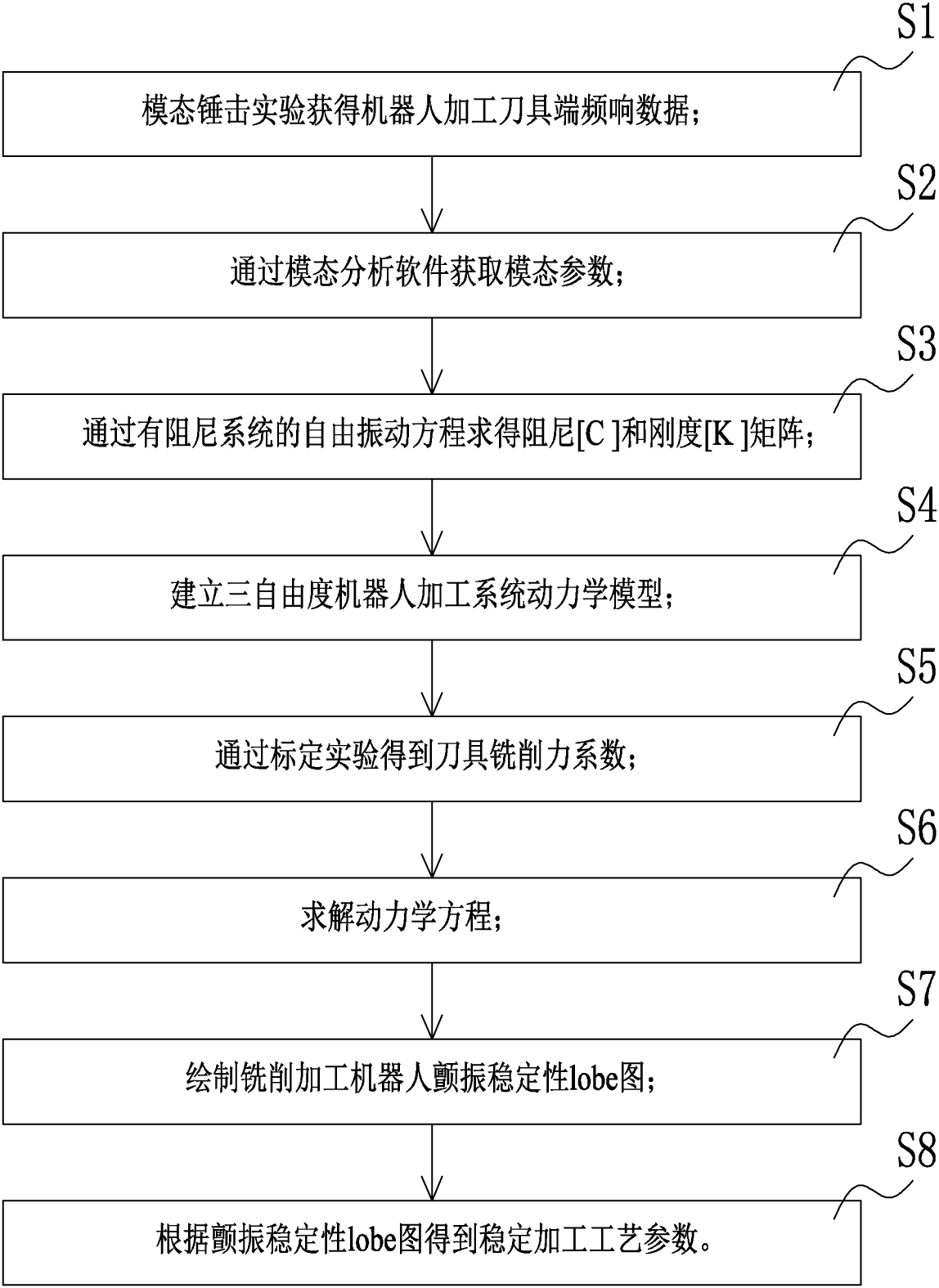
本发明公开了一种大型水轮机顶盖在位机器人减材加工方法及系统,包括以下步骤:S1:通过模态锤击实验获得机器人加工刀具端频响数据;S2:通过模态分析软件获取模态参数;S3:通过有阻尼系统的自由振动方程求得阻尼[C]和刚度[K]矩阵;S4:建立三自由度机器人加工系统动力学模型;S5:通过标定实验得到刀具铣削力系数;S6:求解动力学方程;S7:绘制铣削加工机器人颤振稳定性lobe图;S8:根据颤振稳定性lobe图得到稳定加工工艺参数。通过颤振稳定性lobe图来确定无颤振稳定铣削加工工艺参数,使铣削加工在无颤振工况下稳定的铣削加工,保证了加工质量和刀具的耐久性,实现对水轮发电机组大型顶盖的在位高效率铣削减材加工。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有