

授权公布号:CN108356829B
两轮自平衡引导机器人
有效
申请
2017-12-14
申请公布
2018-08-03
授权
2023-08-15
预估到期
2037-12-14
| 申请号 | CN201711338948.8 |
| 申请日 | 2017-12-14 |
| 申请公布号 | CN108356829A |
| 申请公布日 | 2018-08-03 |
| 授权公布号 | CN108356829B |
| 授权公告日 | 2023-08-15 |
| 分类号 | B25J11/00;B25J19/00;B62K11/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 河北汇金集团股份有限公司 |
| 申请人地址 | 河北省石家庄市高新区湘江道209号 |
专利法律状态
2023-08-15
授权
状态信息
授权
2021-03-26
著录事项变更
状态信息
著录事项变更;IPC(主分类):B25J11/00;变更事项:申请人;变更前:河北汇金机电股份有限公司;变更后:河北汇金集团股份有限公司;变更事项:地址;变更前:050035 河北省石家庄市高新区湘江道209号;变更后:050035 河北省石家庄市高新区湘江道209号
2018-08-28
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J11/00;申请日:20171214
2018-08-03
公布
状态信息
公布
摘要
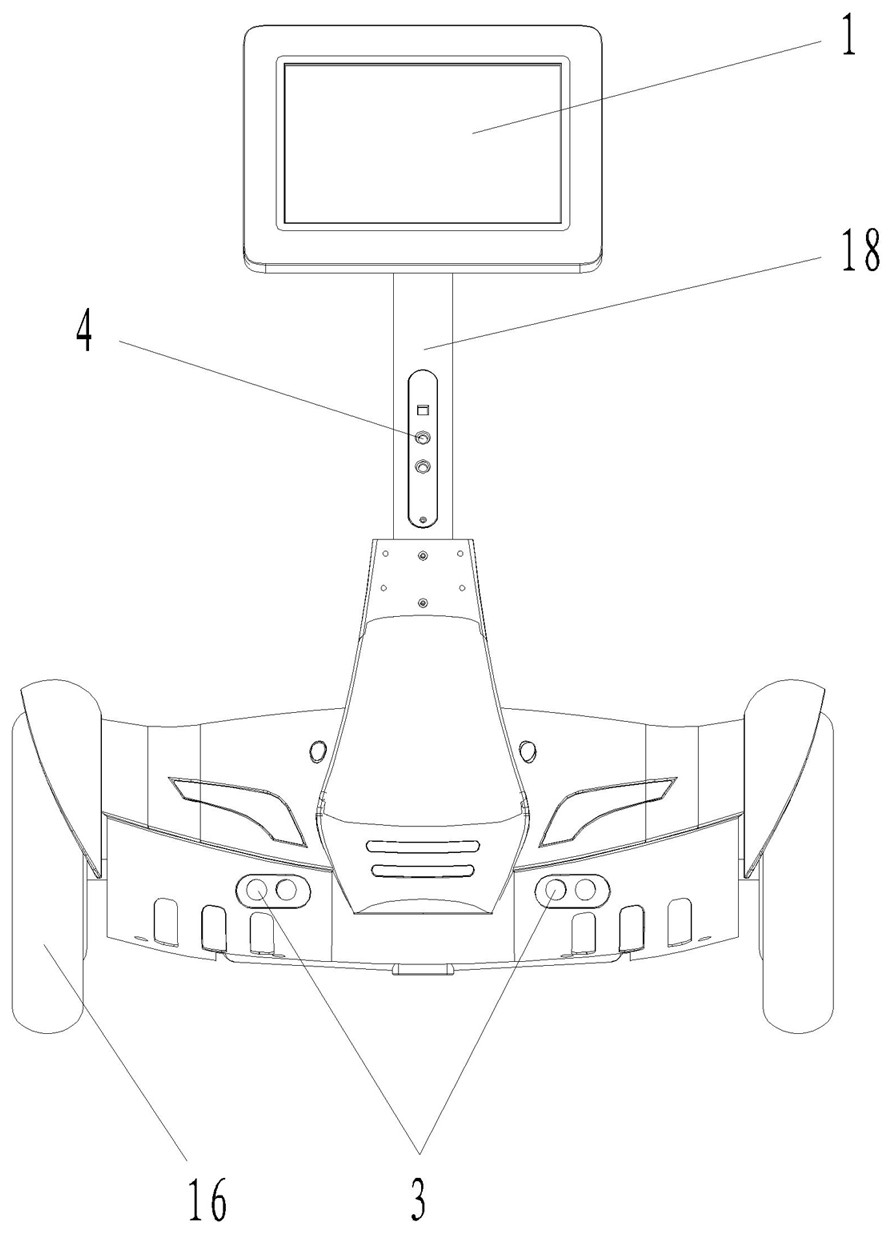
本发明公开了一种两轮自平衡引导机器人,涉及机器人技术领域,包括底盘总成、设置在所述底盘总成上方的触摸屏以及配套的控制系统,所述控制系统包括处理器以及与所述处理器相连的二维激光雷达、超声波传感器、摄像头和姿态检测模块,其特征在于:在所述二维激光雷达与底盘总成间设有自适应调整装置,所述自适应调整装置包括连接支架、设置在所述连接支架上的陀螺仪、与所述连接支架相连的摆动杆、设置在所述摆动杆底部与底盘总成间的摆动转轴以及驱动摆动杆旋转的摆动驱动装置。本发明通过陀螺仪的实时检测地面的状态,自适应调整装置根据陀螺仪的反馈实时瞬间调整二维激光雷达的自身姿态,确保雷达实时保持在同一水平面内,建图精确。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有