

授权公布号:CN113485376B
自适应巡航与路径规划的无人驾驶巡检车
有效
申请
2021-08-16
申请公布
2021-10-08
授权
2022-03-11
预估到期
2041-08-16
| 申请号 | CN202110935911.3 |
| 申请日 | 2021-08-16 |
| 申请公布号 | CN113485376A |
| 申请公布日 | 2021-10-08 |
| 授权公布号 | CN113485376B |
| 授权公告日 | 2022-03-11 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 厦门中卡科技股份有限公司 |
| 申请人地址 | 福建省厦门市思明区宜兰路7号世纪大厦7层01单元 |
专利法律状态
2022-03-11
授权
状态信息
授权
2021-10-08
公布
状态信息
公布
摘要
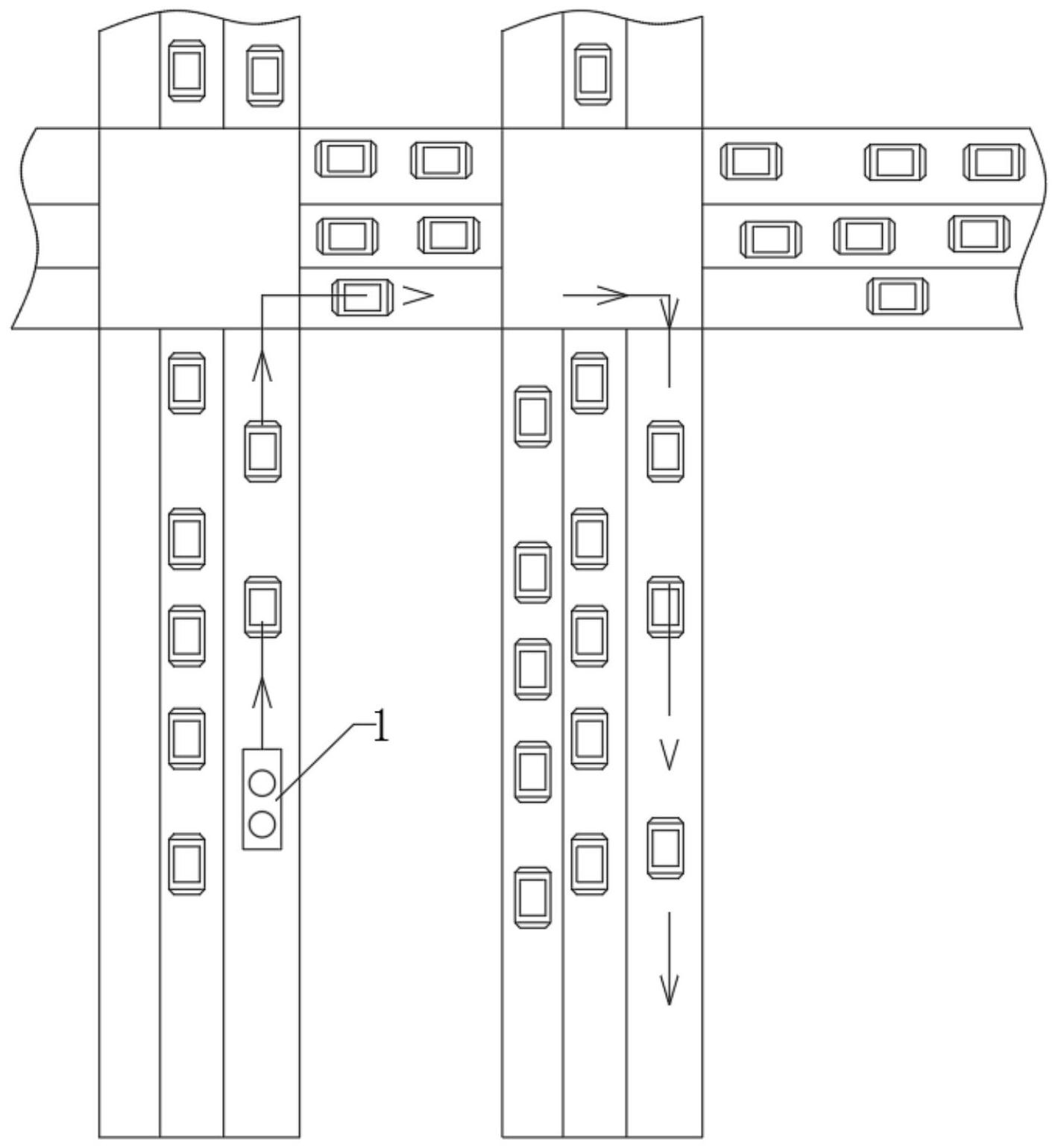
本发明提供自适应巡航与路径规划的无人驾驶巡检车,包括自适应巡航无人驾驶系统,所述自适应巡航无人驾驶系统用于控制巡检车行驶,所述巡检车还包括路径规划系统,所述路径规划系统用于规划巡检车的巡检路径;所述路径规划系统包括数据库获取模块以及路径规划模块;所述数据库获取模块用于获取当前月份和当前需巡检的路径下的前一个月每天的车流量;所述路径规划模块包括巡检路径确定单元以及第一规划单元,所述巡检路径确定单元用于筛选出需要进行巡检的若干条路径,本发明能够根据月和日的车流量对巡检路线进行规划,从而使巡检车能够发挥出最大的巡检效率,以解决现有的巡检车巡检路线规划较为简单导致巡检效率较低的问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有