

授权公布号:CN109719736B
自移动机器人及其控制方法
有效
申请
2017-10-31
申请公布
2019-05-07
授权
2024-03-26
预估到期
2037-10-31
| 申请号 | CN201711043653.8 |
| 申请日 | 2017-10-31 |
| 申请公布号 | CN109719736A |
| 申请公布日 | 2019-05-07 |
| 授权公布号 | CN109719736B |
| 授权公告日 | 2024-03-26 |
| 分类号 | B25J11/00;B25J13/08;B25J19/00;B25J19/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 科沃斯机器人股份有限公司 |
| 申请人地址 | 江苏省苏州市吴中区石湖西路108号 |
专利法律状态
2024-03-26
授权
状态信息
授权
2019-05-07
公布
状态信息
公布
摘要
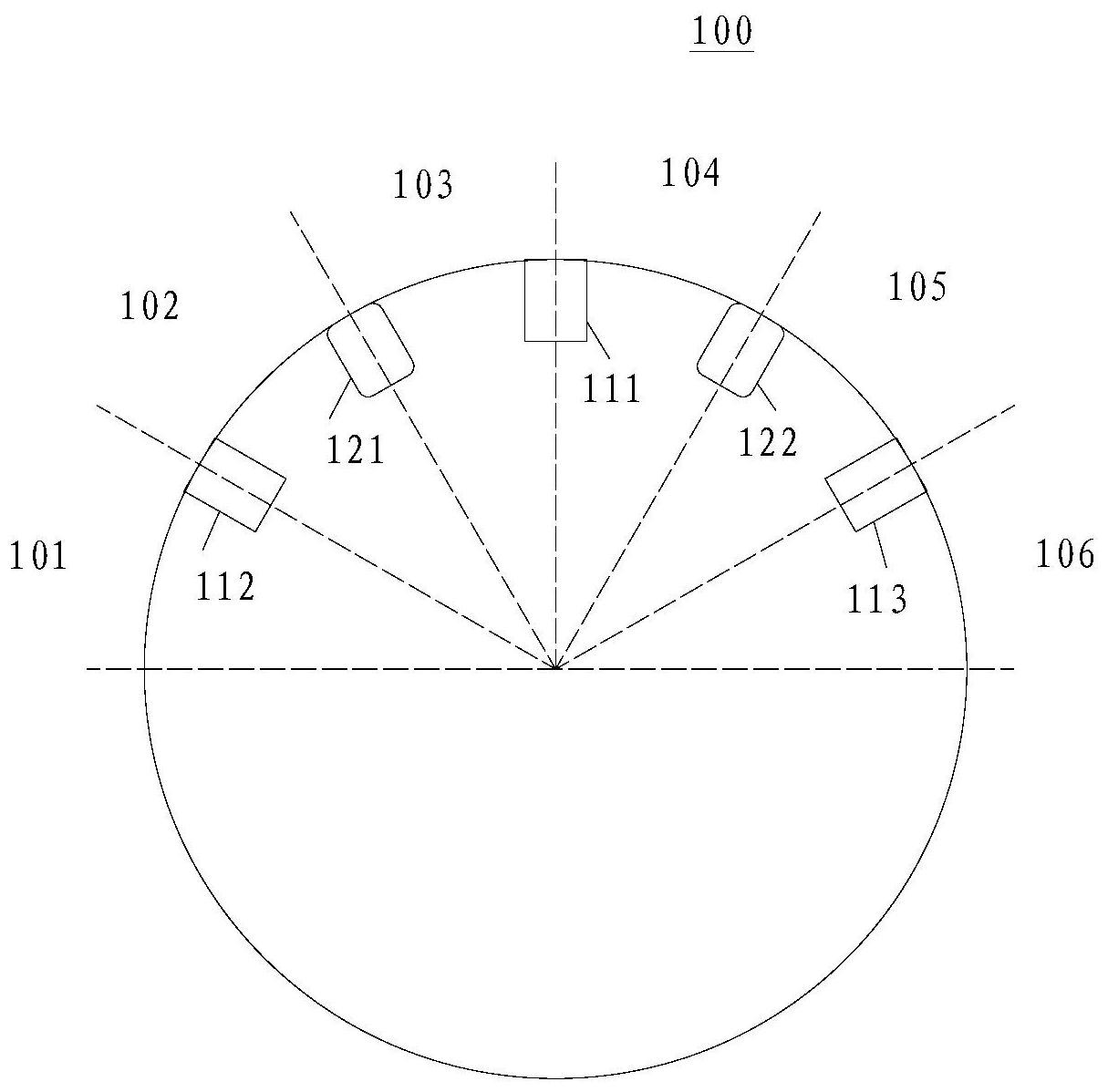
一种自移动机器人及其控制方法,所述自移动机器人包括机器人主体(100),机器人主体上设有检测单元和控制单元,所述检测单元包括多个相互间隔排列的发射器和接收器,所述机器人主体上设有限定件(200),用于控制接收器和发射器的收发范围,所述发射器和接收器分别设置在各自的限定件内,所述控制单元用于控制发射器发射信号,并根据接收器接收到的信号确定障碍物所处的区域。本发明通过设置适当数量的发射器和接收器,再利用限定件控制发射器和接收器的收发范围,根据机器的尺寸,划分出合理的检测区域,并依据接收到的信号快速高效的判断障碍物的具体位置,从而为自移动机器人的行走路径规划及执行避障动作提供更准确的数据。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有