

授权公布号:CN113031616B
一种清洁机器人返回路径规划方法、系统和清洁机器人
有效
申请
2021-03-12
申请公布
2021-06-25
授权
2023-08-01
预估到期
2041-03-12
| 申请号 | CN202110270459.3 |
| 申请日 | 2021-03-12 |
| 申请公布号 | CN113031616A |
| 申请公布日 | 2021-06-25 |
| 授权公布号 | CN113031616B |
| 授权公告日 | 2023-08-01 |
| 分类号 | G05D1/02;A47L11/40 |
| 分类 | 控制;调节; |
| 申请人名称 | 湖南格兰博智能科技有限责任公司 |
| 申请人地址 | 湖南省郴州市苏仙区白露塘镇林经二路与石虎大道交汇处格兰博工业园 |
专利法律状态
2023-08-01
授权
状态信息
授权
2021-07-13
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20210312
2021-06-25
公布
状态信息
公布
摘要
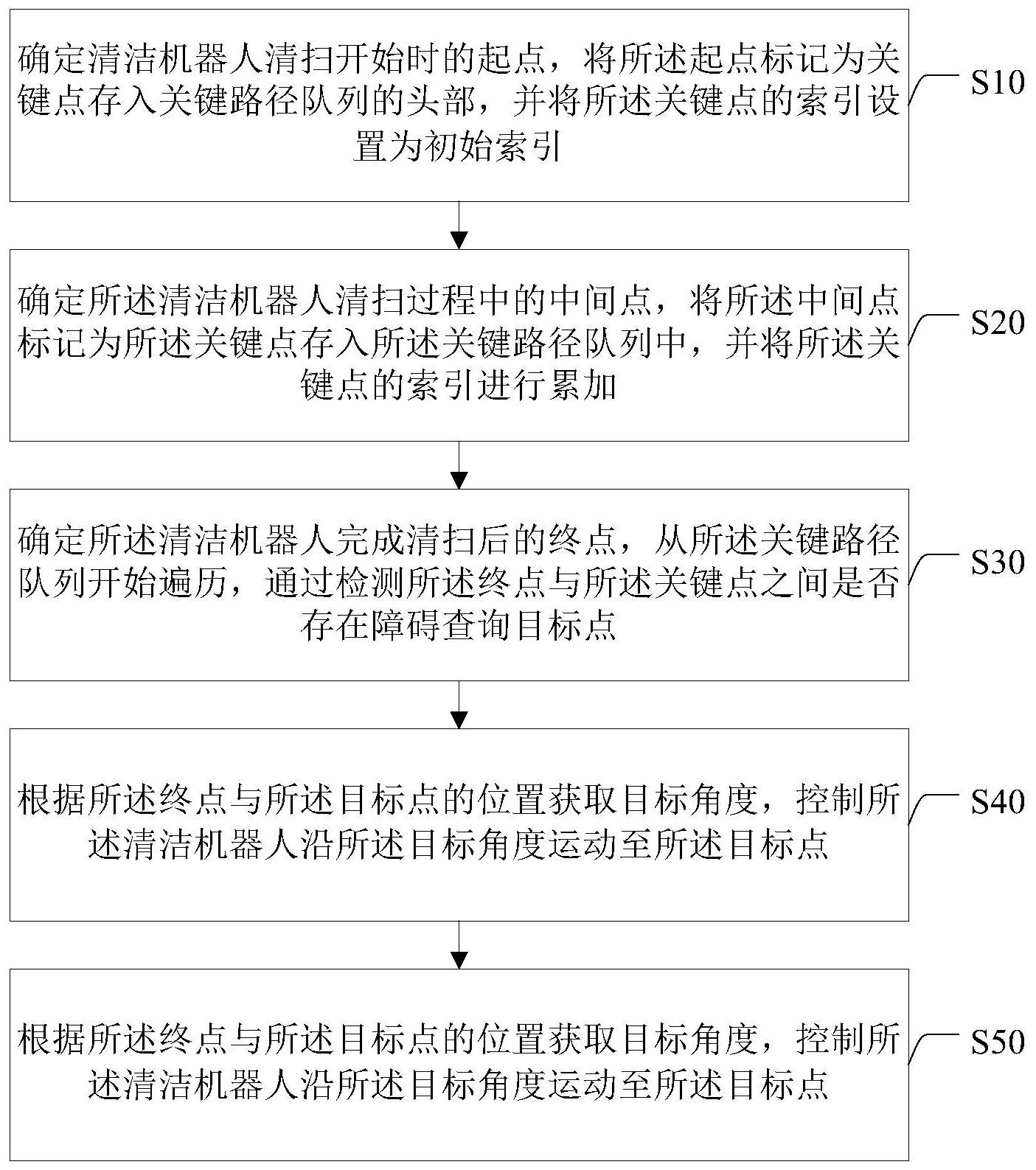
本发明公开了一种清洁机器人返回路径规划方法、系统和清洁机器人,该方法包括:将清洁机器人清扫开始时的起点标记为关键点存入关键路径队列的头部,并将关键点的索引设置为初始索引;将清洁机器人清扫过程中的中间点标记为关键点存入关键路径队列中,并将关键点的索引进行累加;确定清洁机器人完成清扫后的终点,从关键路径队列开始遍历,通过检测终点与关键点之间是否存在障碍查询目标点;根据终点与目标点的位置获取目标角度,控制清洁机器人沿目标角度运动至目标点;通过检测目标点是否为关键路径队列中的第一个关键点,控制清洁机器人执行与检测结果对应的操作。本发明能够减少数据存储量,降低内存开销,以及提高返回路径的规划速度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有