

授权公布号:CN113633222B
一种适用于扫地机的越障算法
有效
申请
2021-07-14
申请公布
2021-11-12
授权
2022-11-01
预估到期
2041-07-14
| 申请号 | CN202110794566.6 |
| 申请日 | 2021-07-14 |
| 申请公布号 | CN113633222A |
| 申请公布日 | 2021-11-12 |
| 授权公布号 | CN113633222B |
| 授权公告日 | 2022-11-01 |
| 分类号 | A47L11/24;A47L11/28;A47L11/40 |
| 分类 | 家具;家庭用的物品或设备;咖啡磨;香料磨;一般吸尘器; |
| 申请人名称 | 湖南格兰博智能科技有限责任公司 |
| 申请人地址 | 湖南省郴州市苏仙区白露塘镇石虎大道与林经二路交汇处(郴州远大住宅工业有限公司旁) |
专利法律状态
2022-11-01
授权
状态信息
授权
2021-11-12
公布
状态信息
公布
摘要
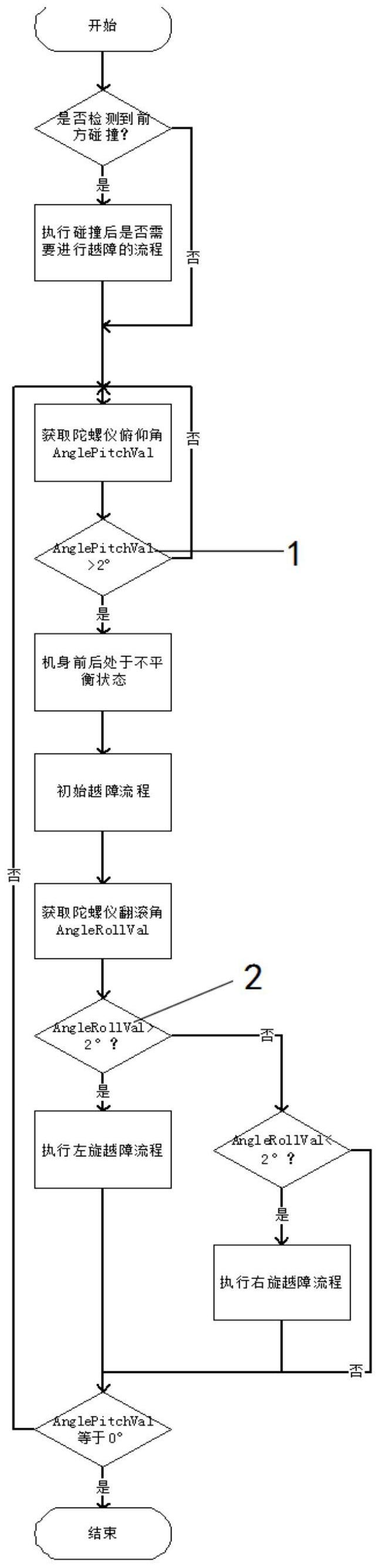
本发明公开了一种适用于扫地机的越障算法,具体涉及机器人技术领域,其技术方案是:包括陀螺仪俯仰角和陀螺仪翻滚角,算法整体流程为:S1:若检测到碰撞后判断继续清扫还是进入越障状态;S2:获取陀螺仪翻滚角和陀螺仪俯仰角,根据陀螺仪翻滚角和陀螺仪俯仰角判断是否大于2度,若是,处于被障碍物悬挂状态,开始越障过程,转到S3,若否,持续执行S1;S3:执行初始越障策略,开始旋转轮子进行越障,利用一边轮子不动,本发明有益效果是:通过陀螺仪的翻滚角和俯仰角来判定机器是否进入越障状态,然后用算法控制机器根据当前状态进行各种越障动作从而让机器摆脱悬挂在障碍物上的状态并成功越过具有一定高度的障碍。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有