

授权公布号:CN112148003B
一种基于机器人的路径优化方法、系统及电子设备
有效
申请
2020-09-01
申请公布
2020-12-29
授权
2023-05-09
预估到期
2040-09-01
| 申请号 | CN202010906858.X |
| 申请日 | 2020-09-01 |
| 申请公布号 | CN112148003A |
| 申请公布日 | 2020-12-29 |
| 授权公布号 | CN112148003B |
| 授权公告日 | 2023-05-09 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 湖南格兰博智能科技有限责任公司 |
| 申请人地址 | 湖南省郴州市白露塘镇石虎大道与林经二路交汇处(郴州远大住宅工业有限公司旁) |
专利法律状态
2023-05-09
授权
状态信息
授权
2020-12-29
公布
状态信息
公布
摘要
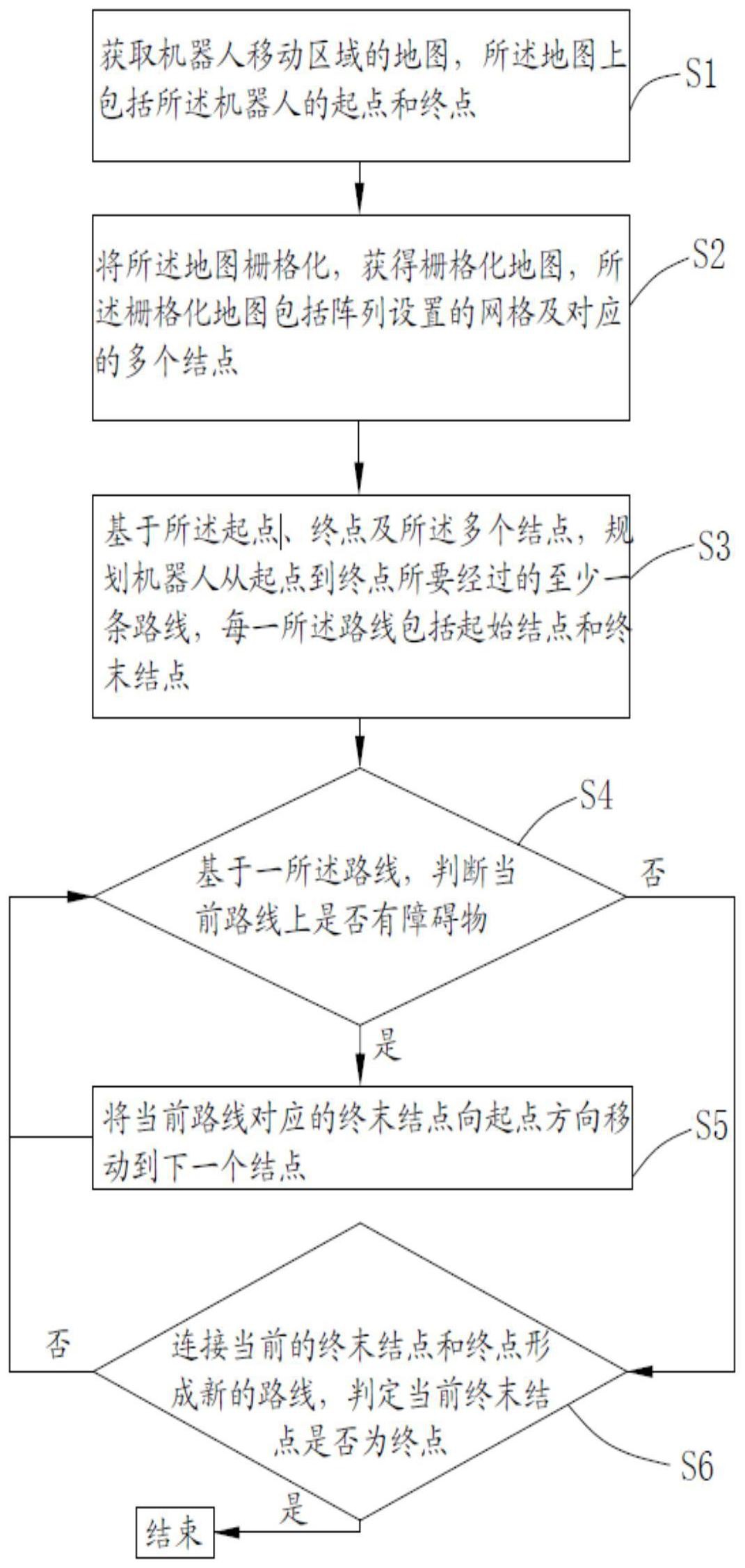
本发明提供一种基于机器人的路径优化方法、系统及电子设备,本方法通过输入外部地图后进行栅格化处理,在遇到地图上的障碍时,移动终末结点,使得移动后的终末结点偏离路障后,在保持原有起点的基础上重新规划新的路线连接到终点上,也即所述路线在原本直线连接的起点和终点的路径基础上进行路线的调整,既灵活地避开的障碍的同时,也让规划的路线更加平滑,避免水平或竖直移动机器人的低效率避障方式,让避障效率更高。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有