

授权公布号:CN105300375B
一种基于单视觉的机器人室内定位和导航方法
有效
申请
2015-09-29
申请公布
2016-02-03
授权
2018-04-20
预估到期
2035-09-29
| 申请号 | CN201510629975.5 |
| 申请日 | 2015-09-29 |
| 申请公布号 | CN105300375A |
| 申请公布日 | 2016-02-03 |
| 授权公布号 | CN105300375B |
| 授权公告日 | 2018-04-20 |
| 分类号 | G01C21/00;G05D1/02 |
| 分类 | 测量;测试; |
| 申请人名称 | 塔米智能科技(北京)有限公司 |
| 申请人地址 | 北京市海淀区苏州街16号神州数码大厦1607室 |
专利法律状态
2018-04-20
授权
状态信息
授权
2016-03-02
实质审查的生效
状态信息
实质审查的生效IPC(主分类):G01C 21/00申请日:20150929
2016-02-03
公布
状态信息
公开
摘要
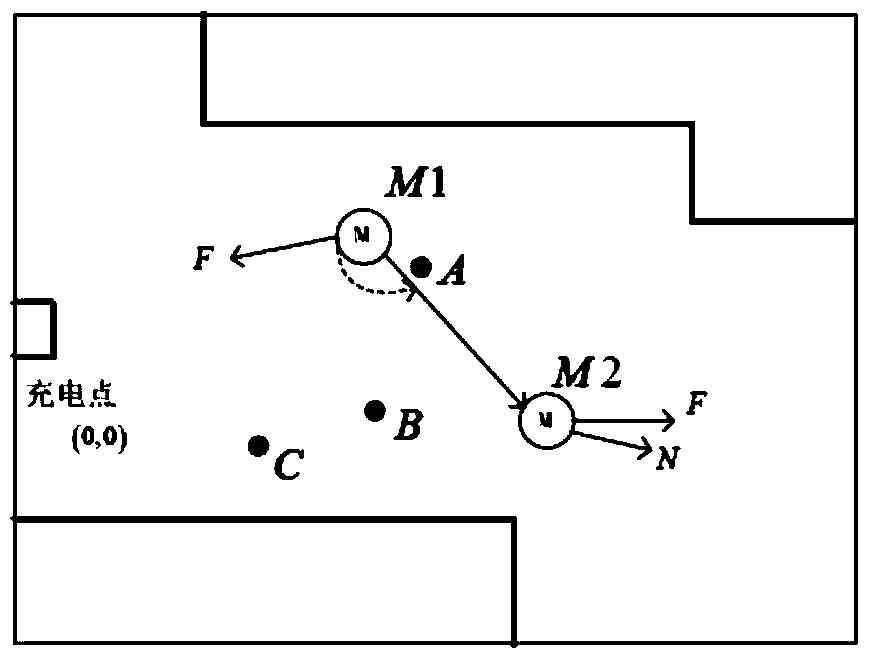
本发明公开了一种基于单视觉的机器人室内定位和导航方法,具体包括如下步骤:步骤S1:初次使用时,需要创建房间的室内地图,具体步骤如下:A):在室内屋顶设置有三个可识别的标记点,机器人以室内的充电点为原点创建室内坐标系,标定三个标记点的坐标和方向信息,并标定电子罗盘方向;B):建立摄像头直角坐标系;C):控制机器人在室内移动,通过声纳传感器检测房间边缘,生成房间的室内地图;步骤S2:对于室内定位:当机器人在房间内的任一点时,通过单目摄像头测量三个标记点并结合摄像头直角坐标系和室内坐标系,计算出机器人所在的位置和方向数据;对于自主导航:设机器人目标点为M2,机器人通过室内定位和目标点定位进行自主导航。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有