

授权公布号:CN110595501B
一种基于三轴传感器的跑步距离校正方法
有效
申请
2019-10-09
申请公布
2019-12-20
授权
2022-10-04
预估到期
2039-10-09
| 申请号 | CN201910952486.1 |
| 申请日 | 2019-10-09 |
| 申请公布号 | CN110595501A |
| 申请公布日 | 2019-12-20 |
| 授权公布号 | CN110595501B |
| 授权公告日 | 2022-10-04 |
| 分类号 | G01C22/00;G01S19/19;A63B71/06;G06F17/18 |
| 分类 | 测量;测试; |
| 申请人名称 | 成都乐动信息技术有限公司 |
| 申请人地址 | 四川省成都市中国(四川)自由贸易试验区成都市高新区世纪城南路599号7栋13层1301-1304号 |
专利法律状态
2022-10-04
授权
状态信息
授权
2019-12-20
公布
状态信息
公布
摘要
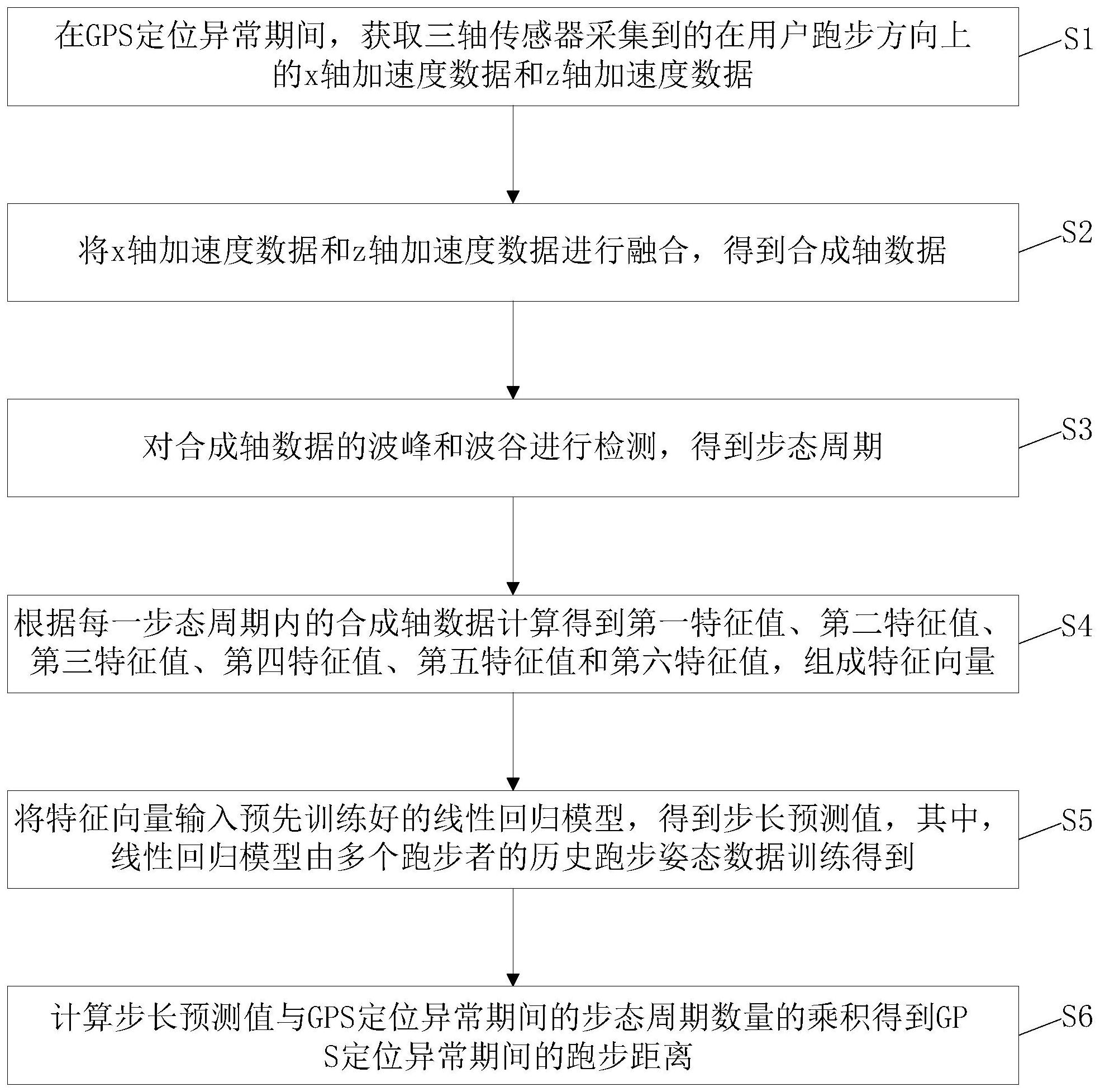
本发明公开了一种基于三轴传感器的跑步距离校正方法,其包括:S1:在GPS定位异常期间,获取三轴传感器采集到的在用户跑步方向上的x轴加速度数据和z轴加速度数据;S2:将两个轴的加速度数据进行融合,得到合成轴数据;S3:对合成轴数据的波峰和波谷进行检测,得到步态周期;S4:根据每一步态周期内的合成轴数据计算得到第一特征值、第二特征值、第三特征值、第四特征值、第五特征值和第六特征值,组成特征向量;S5:将特征向量输入预先训练好的线性回归模型,得到步长预测值;S6:计算步长预测值与GPS定位异常期间的步态周期数量的乘积得到GPS定位异常期间的跑步距离。本发明能够提高跑步距离计算的准确率以及稳定性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有