

授权公布号:CN102645837B
一种应用于安装有前、后摄像头的移动手持设备的全景图像拍摄和处理方法
有效
申请
2012-04-09
申请公布
2012-08-22
授权
2015-02-11
预估到期
2032-04-09
| 申请号 | CN201210101969.9 |
| 申请日 | 2012-04-09 |
| 申请公布号 | CN102645837A |
| 申请公布日 | 2012-08-22 |
| 授权公布号 | CN102645837B |
| 授权公告日 | 2015-02-11 |
| 分类号 | G03B37/02;G06T5/50 |
| 分类 | 摄影术;电影术;利用了光波以外其他波的类似技术;电记录术;全息摄影术〔4〕; |
| 申请人名称 | 广东步步高电子工业有限公司 |
| 申请人地址 | 广东省东莞市长安镇乌沙步步高大道283号 |
专利法律状态
2016-04-13
专利申请权、专利权的转移
状态信息
专利权的转移;IPC(主分类):G03B37/02;登记生效日:20160323;变更事项:专利权人;变更前:广东步步高电子工业有限公司;变更后:维沃移动通信有限公司;变更事项:地址;变更前:523850 广东省东莞市长安镇乌沙管理区内;变更后:523000 广东省东莞市长安镇乌沙步步高大道283号
2015-02-11
授权
状态信息
授权
2012-10-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G03B37/02;申请日:20120409
2012-08-22
公布
状态信息
公布
摘要
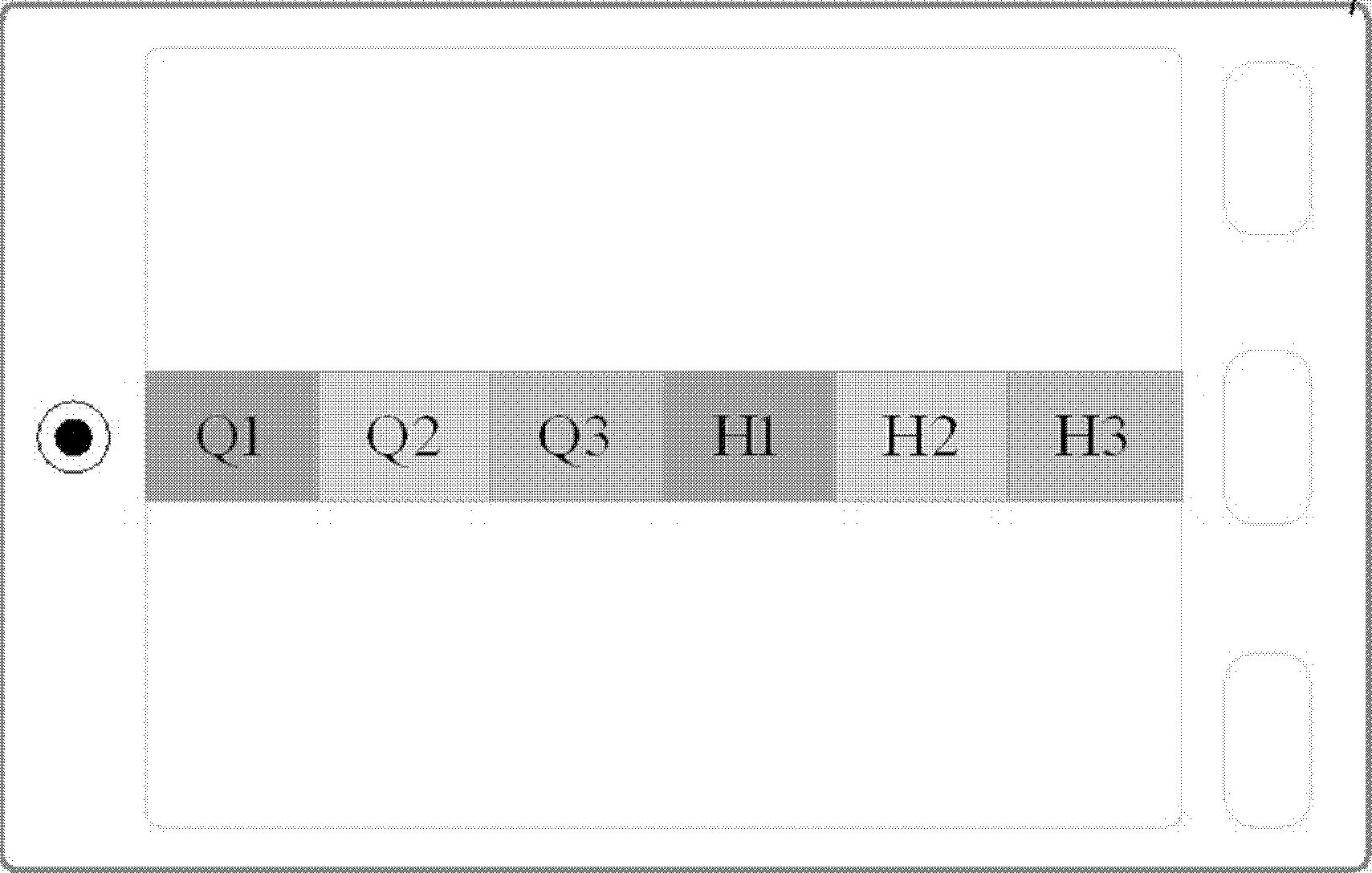
一种应用于安装有前、后摄像头的移动手持设备的全景图像拍摄和处理方法,其特征在于包括:A、进入全景拍摄模式,获取设备三维空间位置信号;B、获取所述位置信号下的场景中周向当前视角下对应的前、后原始图像;C、获取设备在确定所述场景周向下一视角时的周向旋转角度值、水平及垂直方向偏移量;D、根据步骤C获取的值与各预设允许参数值的比较确定所述场景周向下一视角,并获取该视角下对应的前、后原始图像;E、记录周向旋转角度值;F、如果未完成全景拍摄,则继续C、D、E步骤;G、将前、后摄像头所获取的原始图像按拍摄的先后顺序分别标识为Qn和Hn;H、将Qn和Hn分别由小到大排序,并使排序后的Qn位于Hn前;I、将排序后的图像合成全景图。本发明在全景拍摄时具有引导指示功能,利于图像的后期合成处理。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有