

授权公布号:CN113483786B
一种无人潜航器导航定位系统的残余误差测试方法
有效
申请
2021-07-13
申请公布
2021-10-08
授权
2023-08-11
预估到期
2041-07-13
| 申请号 | CN202110789952.6 |
| 申请日 | 2021-07-13 |
| 申请公布号 | CN113483786A |
| 申请公布日 | 2021-10-08 |
| 授权公布号 | CN113483786B |
| 授权公告日 | 2023-08-11 |
| 分类号 | G01C25/00ICN108759864A,2018.11.06;CN110006433A,2019.07.12;US10883852B1,2021.01.05;WO2013059989A1,2013.05.02吕志刚;.基于SINS/DVL/GPS的AUV组合导航标定方法的研究及其误差分析.舰船电子工程.2018,(第06期),全文. |
| 分类 | 测量;测试; |
| 申请人名称 | 中国船舶重工集团有限公司 |
| 申请人地址 | 北京市海淀区昆明湖南路72号 |
专利法律状态
2023-08-11
授权
状态信息
授权
2021-10-26
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C25/00;申请日:20210713
2021-10-08
公布
状态信息
公布
摘要
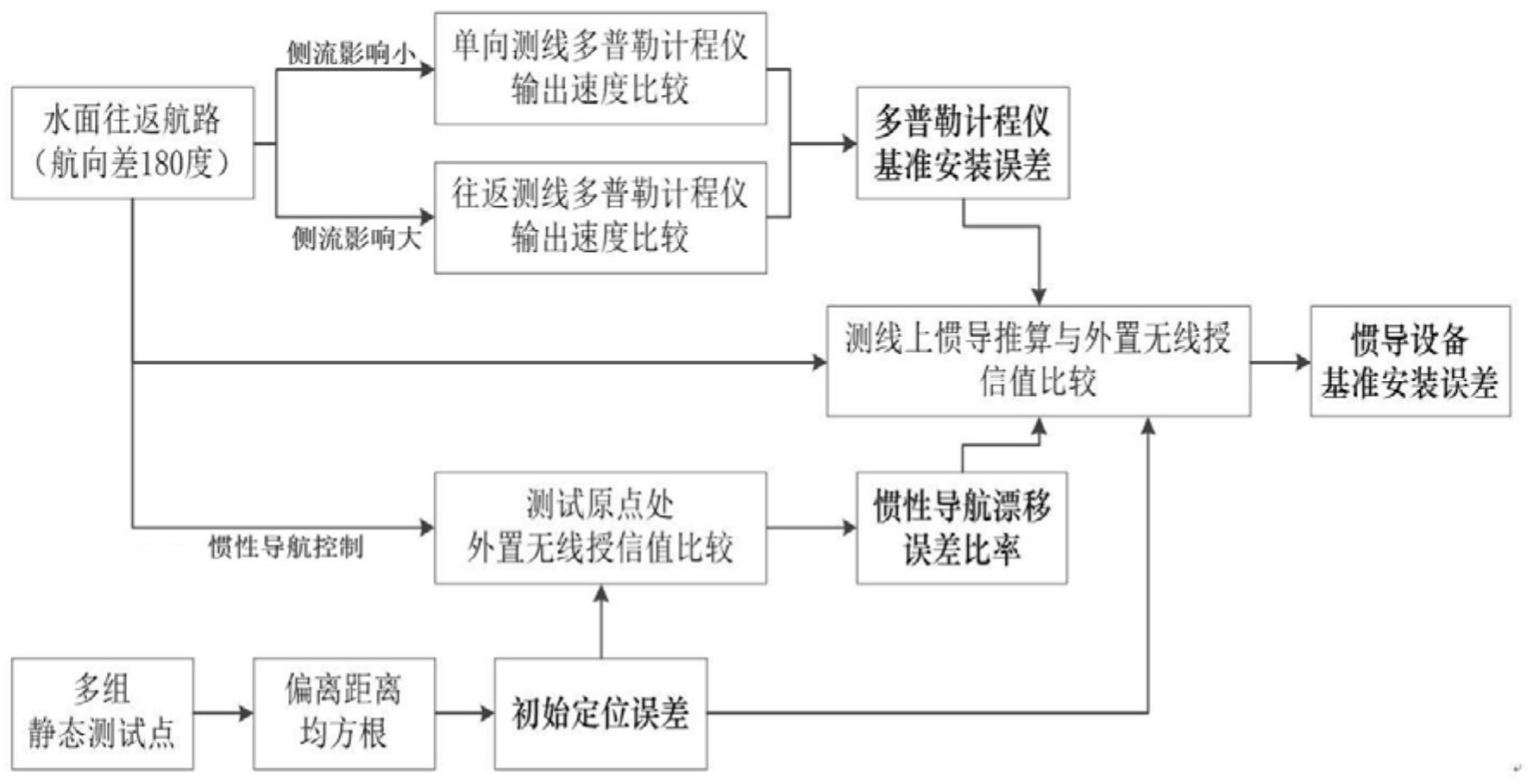
本发明介绍了一种无人潜航器导航定位系统的残余误差测试方法,其包括:采用无人潜航器水面往返直线航路设计,对比内置导航设备与外置无线授信设备记录测点信息,建立波束坐标系、载体坐标系与地理坐标系下速度、航向角度与坐标基准误差角度的关联解析式,细分测试出无人潜航器导航定位系统的初始定位误差、多普勒计程仪和惯性导航设备坐标基准误差,惯性导航设备漂移误差比率等量化值,解决了无人潜航器导航定位系统多种误差量化评估手段不足的工程难题,为进一步针对性改善无人潜航器导航定位性能提供了技术支撑。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有