

授权公布号:CN117140493B
一种内存条生产用转运机械手
有效
申请
2023-11-01
申请公布
2023-12-01
授权
2024-01-12
预估到期
2043-11-01
| 申请号 | CN202311436973.5 |
| 申请日 | 2023-11-01 |
| 申请公布号 | CN117140493A |
| 申请公布日 | 2023-12-01 |
| 授权公布号 | CN117140493B |
| 授权公告日 | 2024-01-12 |
| 分类号 | B25J9/00;B25J15/00;B25J15/02;B25J15/10 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳市嘉合劲威电子科技有限公司 |
| 申请人地址 | 广东省深圳市坪山区龙田街道老坑社区锦绣中路19号美讯数码科技厂区1号厂房B1202A |
专利法律状态
2024-01-12
授权
状态信息
授权
2023-12-19
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/00;申请日:20231101
2023-12-01
公布
状态信息
公布
摘要
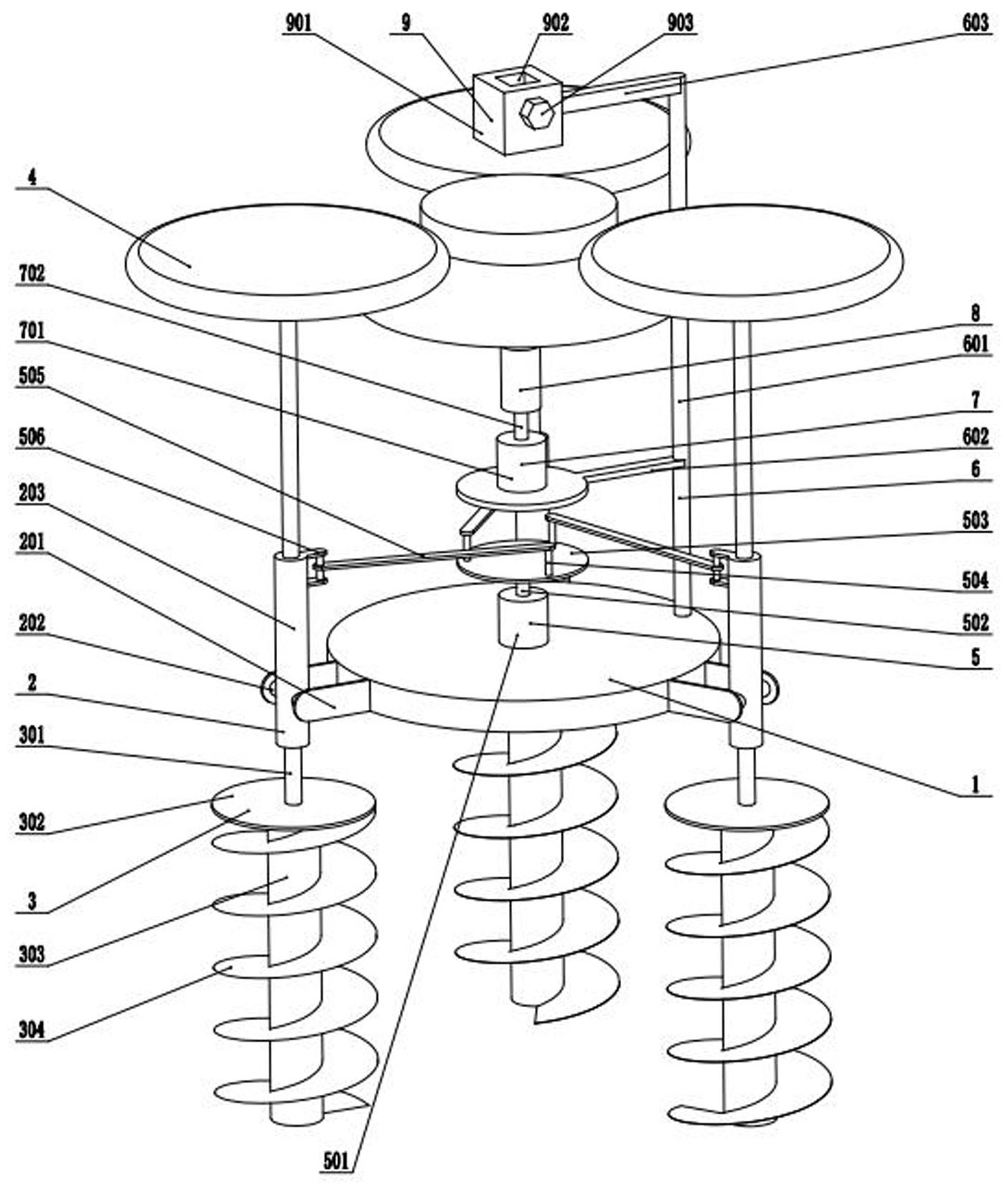
本发明公开了一种内存条生产用转运机械手,涉及机械手技术领域,包括固定板和机械臂,所述机械臂具有三维坐标系内的两个以上转运自由度,固定板的侧边设有若干个转动套筒机构,转动套筒机构上设有提升机构和转动轮,固定板和转动套筒机构之间设有联动杆机构,固定板上设有安装架机构,安装架机构上设有驱动机构,驱动机构连接传动轮机构,安装架机构上设有连接机构,本发明通过设置联动杆机构能够对转动套筒机构的倾角进行调节,进而对提升机构的倾角进行调节,用以对不同大小的内存条进行卡紧,通过驱动机构和传动轮机构能够对转动轮进行驱动,转动轮能够驱动提升机构,在提升机构的带动下能够对内存条进行抓取提升。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有