

授权公布号:CN212077299U
一种缝纫机器人浮动抓手
有效
申请
2019-12-19
申请公布
1970-01-01
授权
2020-12-04
预估到期
2029-12-19
| 申请号 | CN201922289230.5 |
| 申请日 | 2019-12-19 |
| 授权公布号 | CN212077299U |
| 授权公告日 | 2020-12-04 |
| 分类号 | D05B3/00;D05B35/00 |
| 分类 | 缝纫;绣花;簇绒; |
| 申请人名称 | 上工申贝(集团)股份有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区世纪大道1500号东方大厦12楼A-D室 |
专利法律状态
2020-12-04
授权
状态信息
授权
摘要
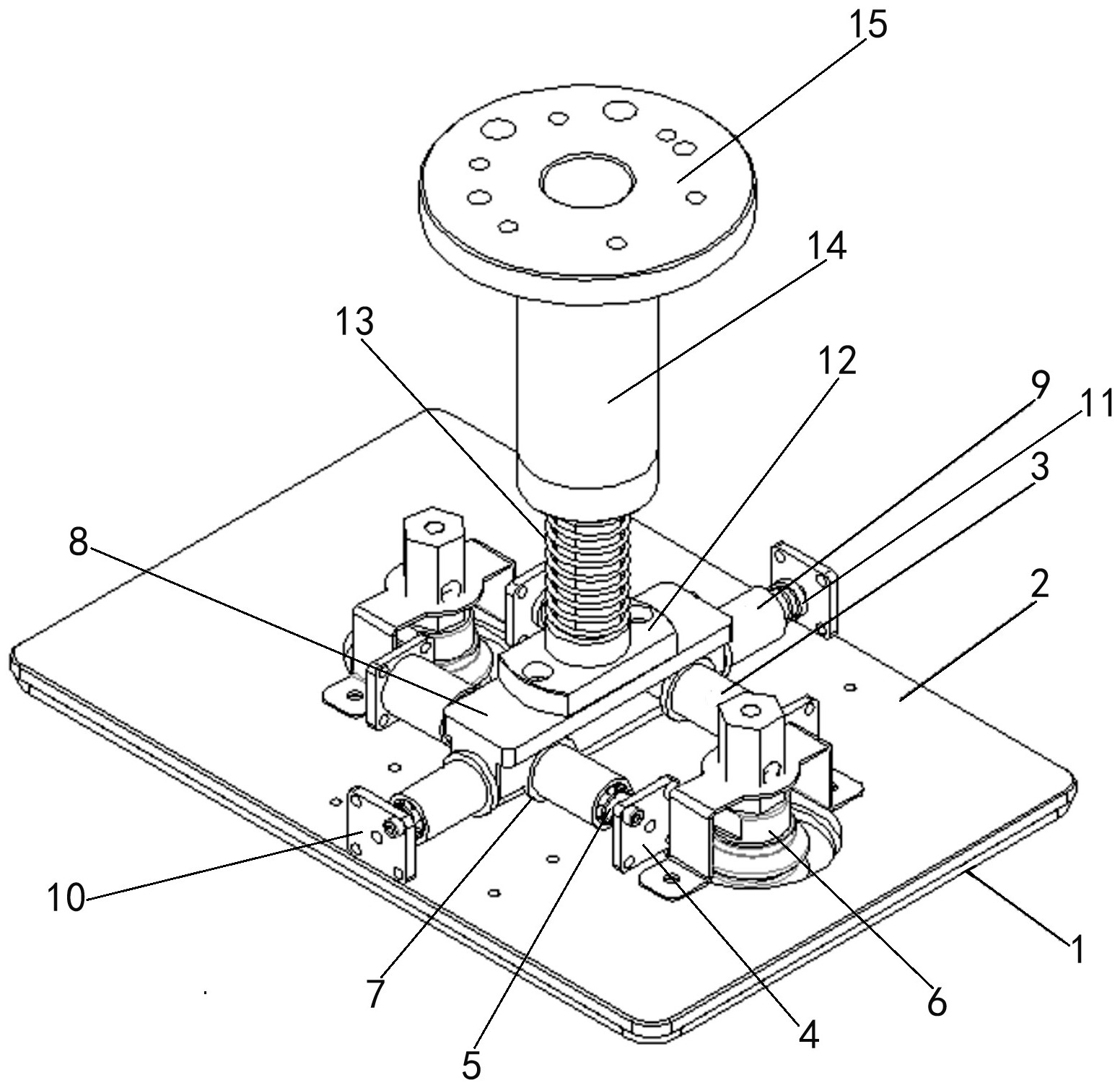
一种缝纫机器人浮动抓手,其特征在于,安装板上方设有X向浮动筒,X向浮动筒设有X向挡板,X向浮动筒中央设有X向中心轴,X向挡板外侧设有一对吸盘,X向浮动筒外侧套接滚轮,滚轮位于滚筒内部,滚筒两端设有Y向浮动筒,Y向浮动筒与Y向弹簧连接,Y向弹簧与Y向挡板连接,滚筒的上端设有Z向弹簧,Z向弹簧上方设有连接法兰;本实用新型的优点在于:抓手结构简单,制造成本低,便于维修保养,有很好的性价比和实用性,三向浮动机构通过螺栓轻易调节弹簧压力,可针对不同厚度、材料的布料,大幅减少缝纫机断针、跳线、断线的故障概率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有