

授权公布号:CN113008249B
移动机器人的避让点检测方法、避让方法以及移动机器人
有效
申请
2021-02-09
申请公布
2021-06-22
授权
2024-03-12
预估到期
2041-02-09
| 申请号 | CN202110178772.4 |
| 申请日 | 2021-02-09 |
| 申请公布号 | CN113008249A |
| 申请公布日 | 2021-06-22 |
| 授权公布号 | CN113008249B |
| 授权公告日 | 2024-03-12 |
| 分类号 | G01C21/32;G01C21/34 |
| 分类 | 测量;测试; |
| 申请人名称 | 广州视睿电子科技有限公司 |
| 申请人地址 | 广东省广州市黄埔区科学城科珠路192号 |
专利法律状态
2024-03-12
授权
状态信息
授权
2021-07-09
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/32;申请日:20210209
2021-06-22
公布
状态信息
公布
摘要
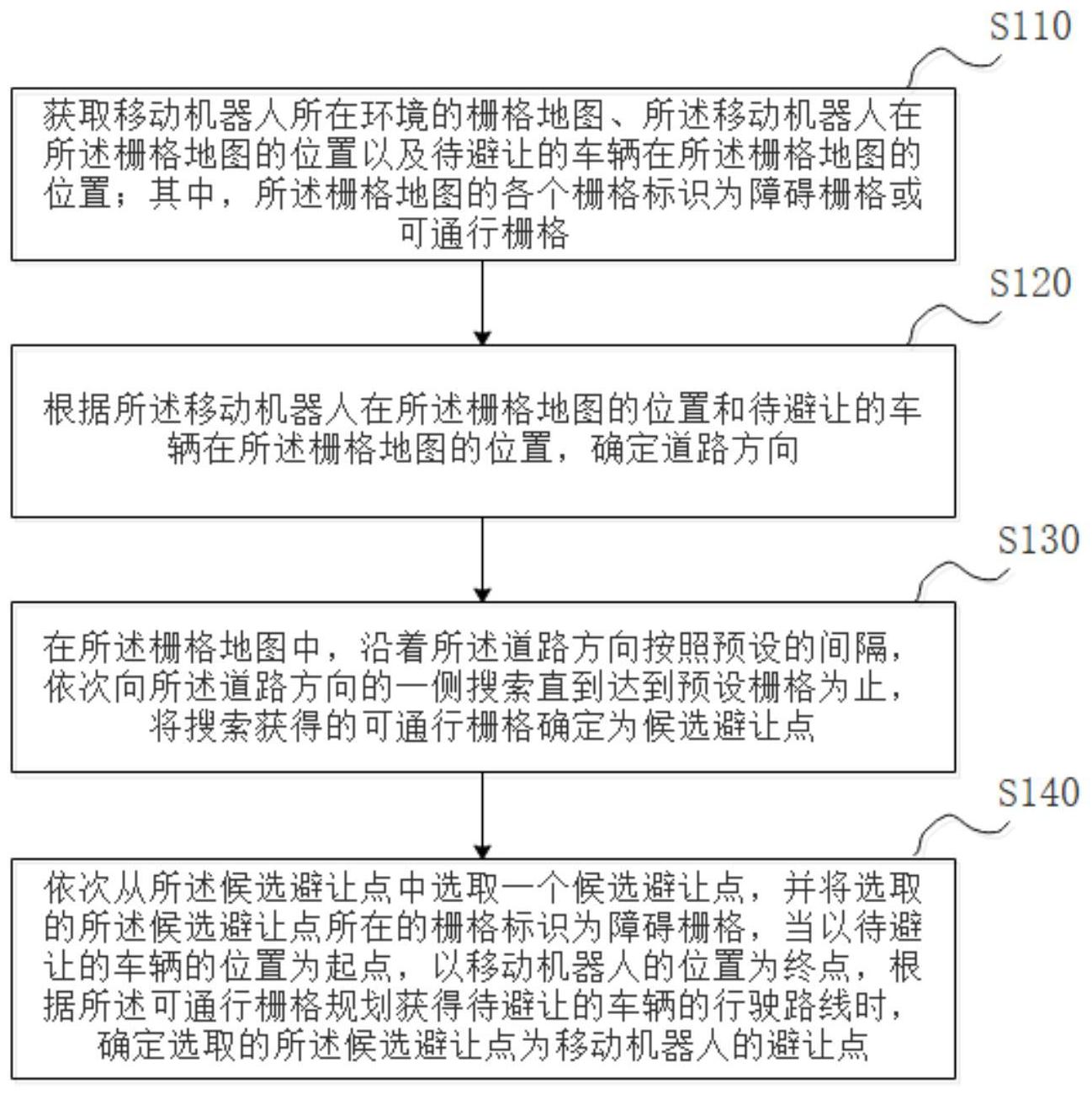
本申请实施例提供一种移动机器人的避让点检测方法、避让方法、装置、移动机器人以及存储介质,其中方法包括:获取栅格地图、移动机器人的位置以及待避让的车辆的位置;确定道路方向;沿着道路方向按照预设的间隔,依次向道路方向的一侧搜索直到达到预设栅格为止,将搜索获得的可通行栅格确定为候选避让点;依次从候选避让点中选取一个候选避让点,并将选取的候选避让点所在的栅格标识为障碍栅格,当以待避让的车辆的位置为起点,以移动机器人的位置为终点,根据可通行栅格规划获得待避让的车辆的行驶路线时,确定选取的候选避让点为移动机器人的避让点。本申请实施例可以防止移动机器人挡住待避让的车辆,造成交通拥堵的情况。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有