

授权公布号:CN114932961B
一种四足机器人运动控制系统
有效
申请
2022-06-15
申请公布
2022-08-23
授权
2023-10-10
预估到期
2042-06-15
| 申请号 | CN202210678680.7 |
| 申请日 | 2022-06-15 |
| 申请公布号 | CN114932961A |
| 申请公布日 | 2022-08-23 |
| 授权公布号 | CN114932961B |
| 授权公告日 | 2023-10-10 |
| 分类号 | B62D57/032 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 中电海康集团有限公司 |
| 申请人地址 | 浙江省杭州市余杭区五常街道爱橙街198号 |
专利法律状态
2023-10-10
授权
状态信息
授权
2022-10-14
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62D57/032;申请日:20220615
2022-08-23
公布
状态信息
公布
摘要
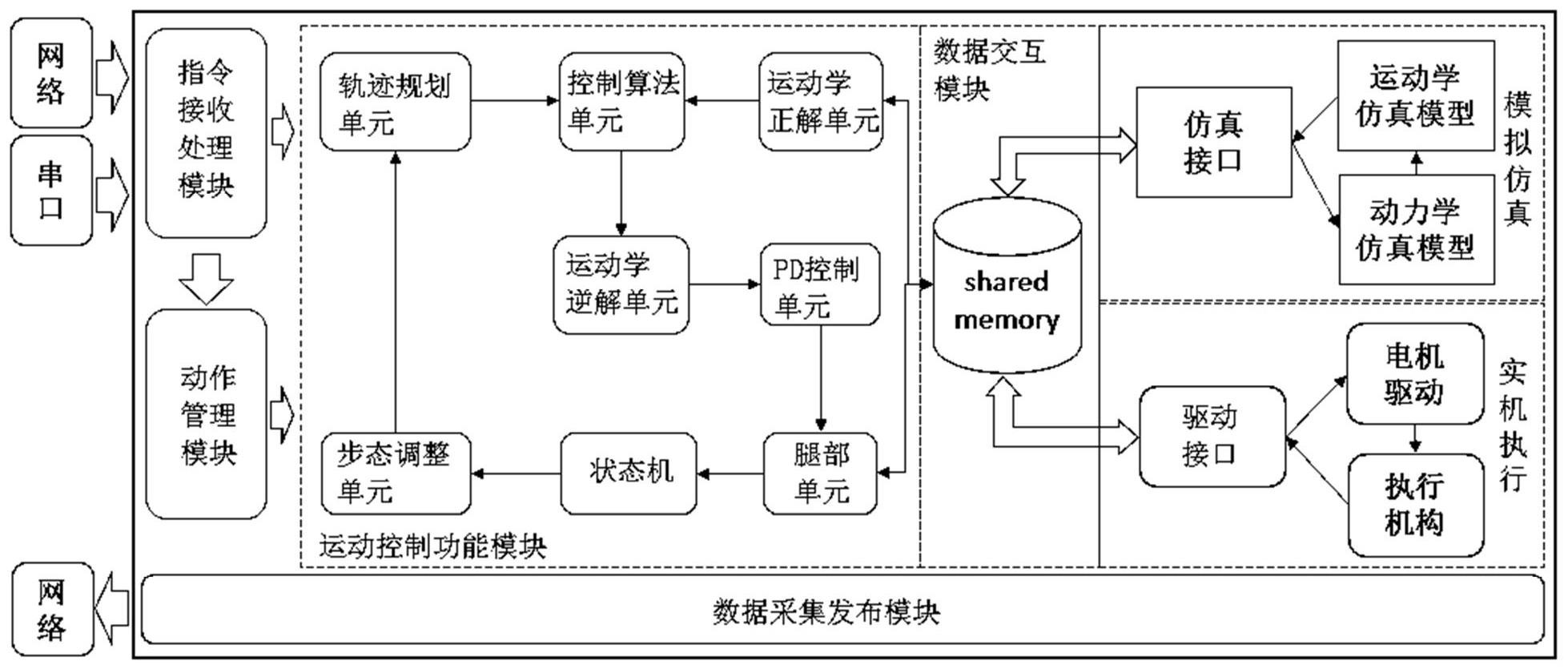
本发明公开了一种四足机器人运动控制系统,包括:指令接收处理模块、动作管理模块、运动控制功能模块、数据交互模块、模拟仿真模块和实机执行模块。本发明提供的四足机器人运动控制系统,实现各模块的独立开发;可通过硬件接入/网络接入等多种控制方式实现运动控制指令的发送,可实时监控机器人状态数据,做问题分析,系统架构清晰,模块耦合度低,系统健壮性好,将算法独立封装为模块,可在不改动其他软件逻辑的情况下,直接验证控制算法,适用于各种基于嵌入式设备的机器人功能开发仿真调试,应用范围广。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有