

授权公布号:CN111966090B
机器人边界地图构建方法、装置及机器人
有效
申请
2020-07-17
申请公布
2020-11-20
授权
2024-02-06
预估到期
2040-07-17
| 申请号 | CN202010689827.3 |
| 申请日 | 2020-07-17 |
| 申请公布号 | CN111966090A |
| 申请公布日 | 2020-11-20 |
| 授权公布号 | CN111966090B |
| 授权公告日 | 2024-02-06 |
| 分类号 | G05D1/43;G05D1/243;G05D1/246;G05D1/633;G05D1/644;G05D105/15N |
| 分类 | 控制;调节; |
| 申请人名称 | 深圳拓邦股份有限公司 |
| 申请人地址 | 广东省深圳市南山区粤海街道高新技术产业园清华大学研究院B区413房 |
专利法律状态
2024-02-06
授权
状态信息
授权
2020-12-08
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200717
2020-11-20
公布
状态信息
公布
摘要
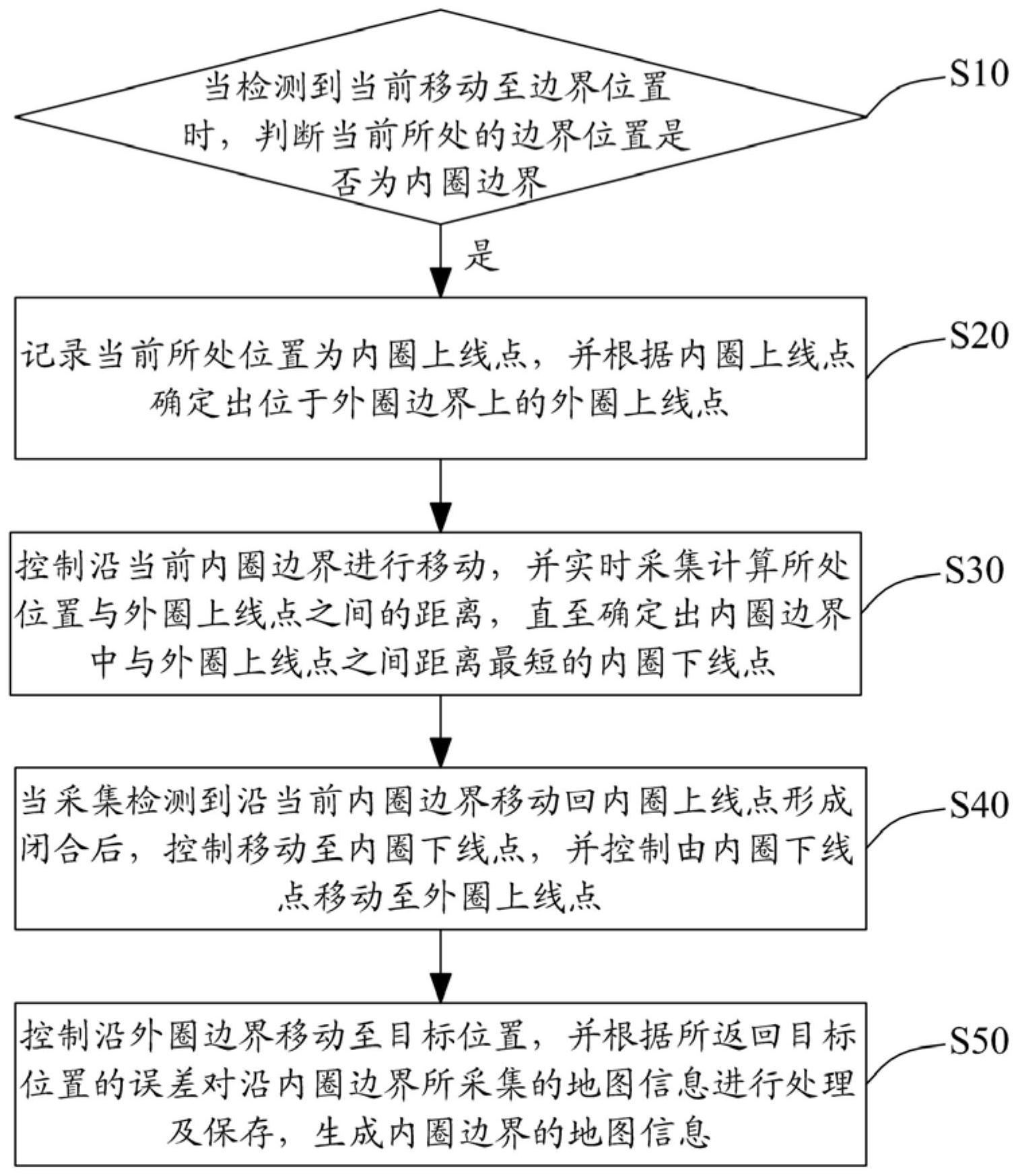
本发明适用于机器人技术领域,提供了一种机器人边界地图构建方法、装置及机器人,该方法包括当检测到当前移动至边界位置时,判断当前所处的边界位置是否为内圈边界;若是,记录当前所处位置为内圈上线点,根据内圈上线点确定出外圈上线点;控制沿当前内圈边界进行移动,并实时采集计算所处位置与外圈上线点之间的距离,直至确定出相距最短的内圈下线点;当采集检测到沿当前内圈边界移动回内圈上线点形成闭合后,控制移动至内圈下线点,并控制由内圈下线点移动至外圈上线点;控制沿外圈边界移动至目标位置,并根据所返回目标位置的误差对沿内圈边界所采集的地图信息进行处理及保存。本发明解决了现有机器人边界地图构建效率低的问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有