

授权公布号:CN114485681B
一种利用DR轨迹评价中精度地图数据一致率的方法
有效
申请
2021-12-30
申请公布
2022-05-13
授权
2023-10-10
预估到期
2041-12-30
| 申请号 | CN202111647087.8 |
| 申请日 | 2021-12-30 |
| 申请公布号 | CN114485681A |
| 申请公布日 | 2022-05-13 |
| 授权公布号 | CN114485681B |
| 授权公告日 | 2023-10-10 |
| 分类号 | G01C21/30;G01C25/00;G06V20/58 |
| 分类 | 测量;测试; |
| 申请人名称 | 武汉光庭信息技术股份有限公司 |
| 申请人地址 | 湖北省武汉市东湖开发区光谷软件园一期以西、南湖南路以南光谷软件园六期2幢8层208号 |
专利法律状态
2023-10-10
授权
状态信息
授权
2022-05-31
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/30;申请日:20211230
2022-05-13
公布
状态信息
公布
摘要
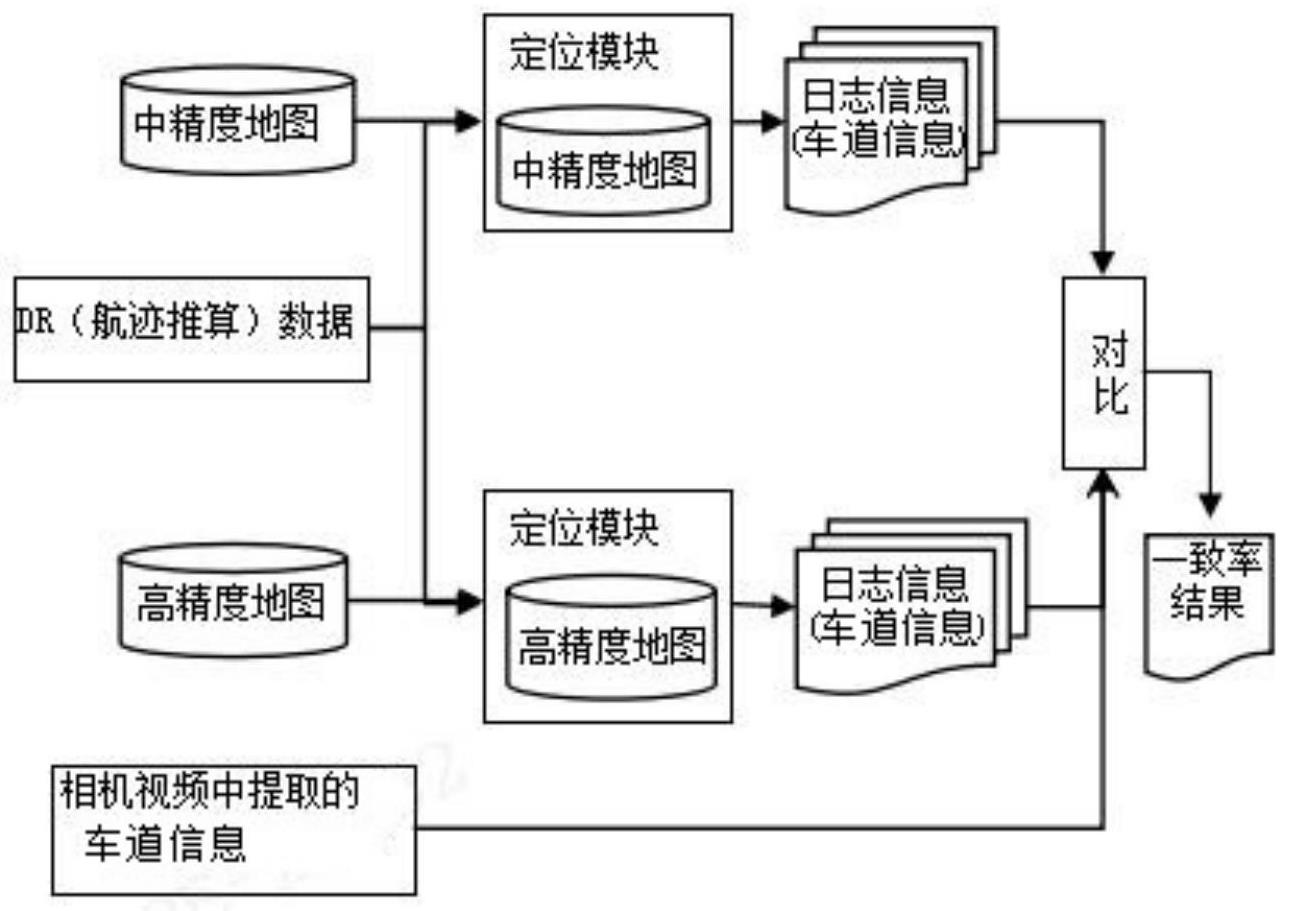
本发明提供一种利用DR轨迹评价中精度地图数据一致率的方法,包括:采集车辆行驶时的DR数据及视频,将DR数据中的轨迹点分别定位到中精度地图以及高精度地图中、并分别匹配出所述轨迹点所属车道的车道中心线,中精度地图及高精度地图分别输出对应的车道信息;提取视频中的车道信息;将中精度地图中输出的车道信息与高精度地图中输出的车道信息进行对比,得到结果A;将中精度地图的车道信息与视频中的车道信息相对比,得到结果B;根据结果A与结果B,判断当前轨迹点的数据一致性;遍历DR数据中的全部轨迹点,根据全部轨迹点的数据一致性计算中精度地图的数据一致率。本发明通过评估中精度地图与高精度地图之间精度差距,以评估其可用性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有