

授权公布号:CN113899377B
一种基于相机的自动泊车终点相对坐标的测量方法及系统
有效
申请
2021-08-23
申请公布
2022-01-07
授权
2023-10-27
预估到期
2041-08-23
| 申请号 | CN202110971734.4 |
| 申请日 | 2021-08-23 |
| 申请公布号 | CN113899377A |
| 申请公布日 | 2022-01-07 |
| 授权公布号 | CN113899377B |
| 授权公告日 | 2023-10-27 |
| 分类号 | G01C21/34;G01C21/36 |
| 分类 | 测量;测试; |
| 申请人名称 | 武汉光庭信息技术股份有限公司 |
| 申请人地址 | 湖北省武汉市东湖开发区光谷软件园一期以西、南湖南路以南光谷软件园六期2幢8层208号 |
专利法律状态
2023-10-27
授权
状态信息
授权
2022-01-25
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/34;申请日:20210823
2022-01-07
公布
状态信息
公布
摘要
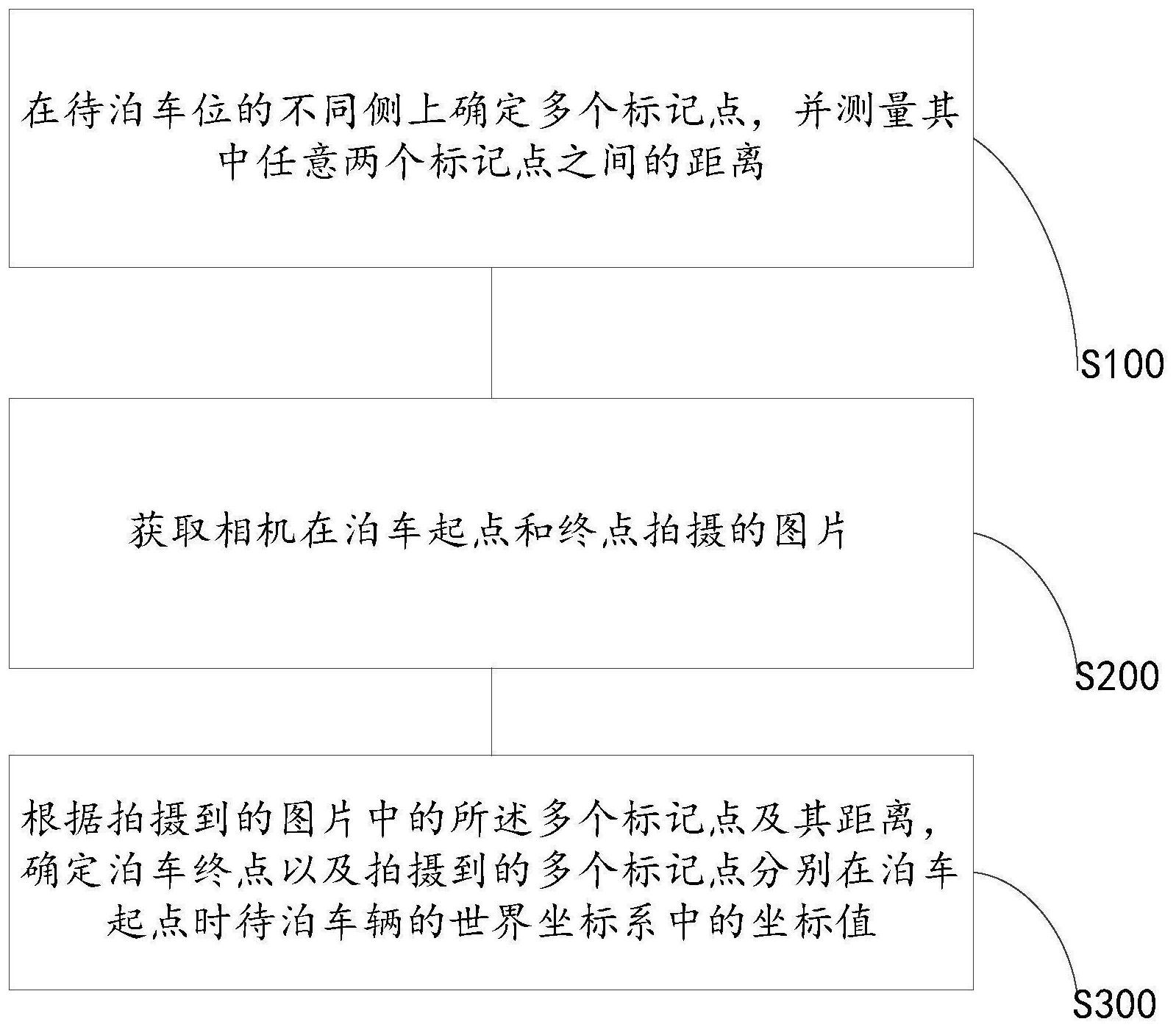
本发明涉及一种基于相机的自动泊车终点相对坐标的测量方法及系统,其方法包括:在待泊车位的不同侧上确定多个标记点,并测量其中任意两个标记点之间的距离;获取相机在泊车起点和终点拍摄的图片;根据拍摄到的图片中的所述多个标记点及其距离,确定泊车终点以及拍摄到的多个标记点分别在泊车起点时待泊车辆的世界坐标系中的坐标值。本发明利用相机自带标定的特点,减少了传感器标定的重复作业,在无定位真值测量的传感器或者其定位精度低的场景下,也能高效快捷的进行定位真值测量工作,减少了人工测量的工作量,提高了工作效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有