

授权公布号:CN114378796B
主从与自主作业一体化的机械臂系统、机器人系统及方法
有效
申请
2022-03-04
申请公布
2022-04-22
授权
2023-09-05
预估到期
2042-03-04
| 申请号 | CN202210212386.7 |
| 申请日 | 2022-03-04 |
| 申请公布号 | CN114378796A |
| 申请公布日 | 2022-04-22 |
| 授权公布号 | CN114378796B |
| 授权公告日 | 2023-09-05 |
| 分类号 | B25J9/00;B25J9/16;B25J13/00;B25J13/08 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 国网智能科技股份有限公司 |
| 申请人地址 | 山东省济南市高新孙村片区飞跃大道以南、26号路以东(ICT产业园内)电力智能机器人生产项目101 |
专利法律状态
2023-09-05
授权
状态信息
授权
2022-09-30
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):B25J9/00;登记生效日:20220919;变更事项:申请人;变更前:国网智能科技股份有限公司;变更后:国网智能科技股份有限公司;变更事项:地址;变更前:250104 山东省济南市高新孙村片区飞跃大道以南、26号路以东(ICT产业园内)电力智能机器人生产项目101;变更后:250101 山东省济南市高新孙村片区飞跃大道以南、26号路以东(ICT产业园内)电力智能机器人生产项目101;变更事项:申请人;变更后:国网山东省电力公司电力科学研究院
2022-05-10
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/00;申请日:20220304
2022-04-22
公布
状态信息
公布
摘要
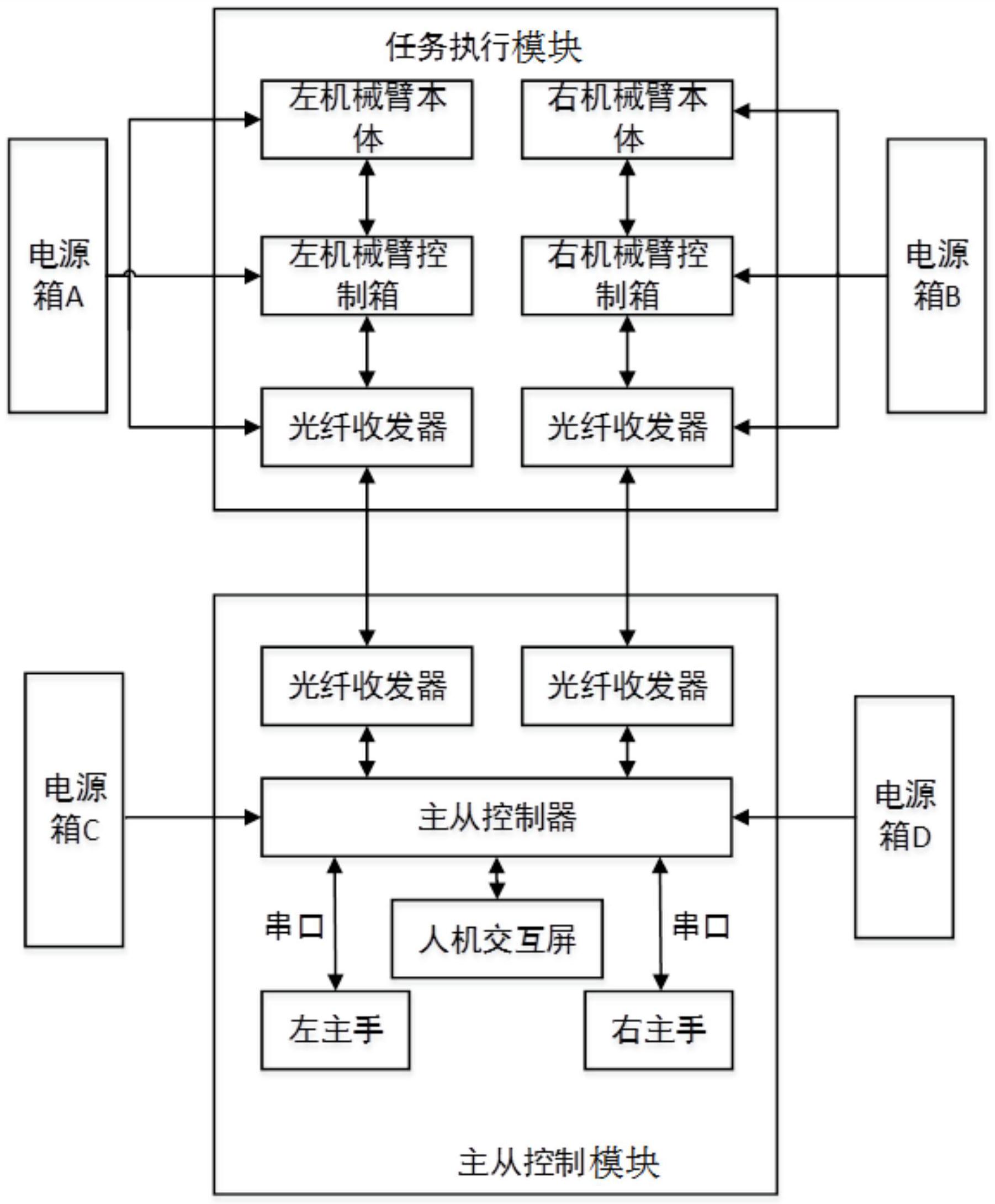
本发明属于高空作业带电作业技术领域,提供了一种主从与自主作业一体化的机械臂系统、机器人系统及方法。其中,该机械臂系统包括任务执行模块和主从控制模块;所述任务执行模块包括机械臂本体及与其相连的机械臂控制器;所述主从控制模块包括主手和主从控制器,所述主手与主从控制器相连,所述主从控制器与机械臂控制器相互通信;所述主从控制器用于接收作业环境信息,并判断作业环境信息的操作复杂度,根据作业环境信息的操作复杂度来控制所述机械臂系统在主从控制模式和自主控制模式之间切换;其中,所述操作复杂度由所述机械臂本体的所需执行指令数来表征。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有