

授权公布号:CN110414337B
目标姿态检测系统及其检测方法
有效
申请
2019-06-21
申请公布
2019-11-05
授权
2023-12-05
预估到期
2039-06-21
| 申请号 | CN201910543059.8 |
| 申请日 | 2019-06-21 |
| 申请公布号 | CN110414337A |
| 申请公布日 | 2019-11-05 |
| 授权公布号 | CN110414337B |
| 授权公告日 | 2023-12-05 |
| 分类号 | G06V20/56;G06V10/82;G06N3/084 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 联创汽车电子有限公司 |
| 申请人地址 | 上海市徐汇区武康路390号 |
专利法律状态
2023-12-05
授权
状态信息
授权
2020-06-26
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):G06K9/00;登记生效日:20200609;变更事项:申请人;变更前:联创汽车电子有限公司;变更后:上海汽车工业(集团)总公司;变更事项:地址;变更前:201206 上海市浦东新区金吉路33弄4幢4楼;变更后:200031 上海市徐汇区武康路390号;变更事项:申请人;变更后:联创汽车电子有限公司
2019-11-29
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06K9/00;申请日:20190621
2019-11-05
公布
状态信息
公布
摘要
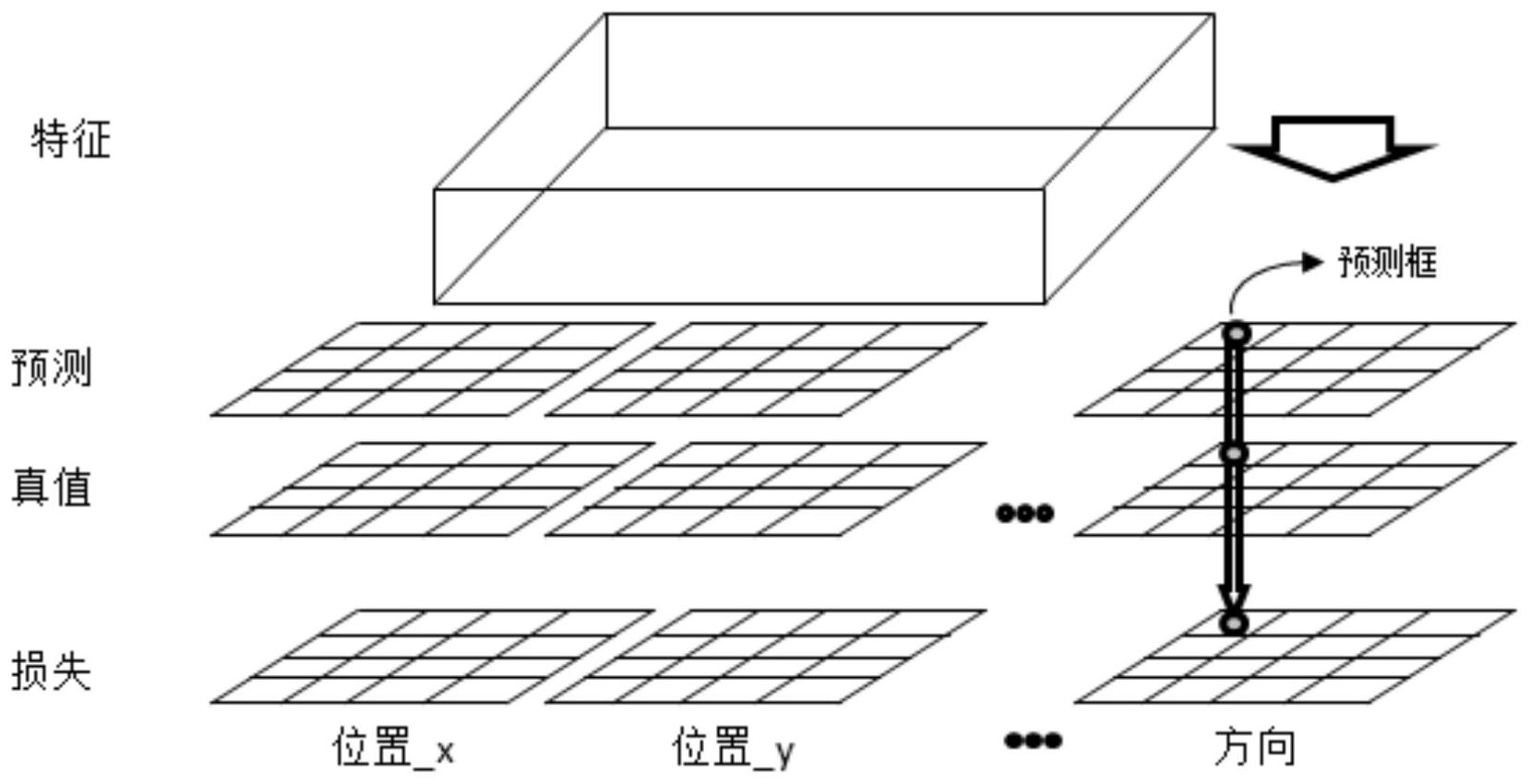
本发明公开了一种基于深度学习单目视觉神经网络目标姿态检测方法,包括:姿态真值预处理,目标姿态检测,目标姿态损失优化,目标包围框及姿态预测,目标姿态解析,目标姿态偏置角获取,目标姿态视角修正获取,形成最终目标姿态。本发明还公开了一种基于深度学习单目视觉神经网络目标姿态检测系统。本发明将卷积层提取出的特征向量进行全连后,利用三角函数将得到的参数归一化后和原有的目标包围框参数整合成一个损失函数进行优化,使得神经网络收敛。本发明提高了智能驾驶环境感知系统对周围环境信息获取的鲁棒性,为后融合提供了高精度了目标姿态属性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有