

授权公布号:CN114475600B
全速域ACC跟车控制方法和系统
有效
申请
2021-12-27
申请公布
2022-05-13
授权
2024-03-08
预估到期
2041-12-27
| 申请号 | CN202111613098.4 |
| 申请日 | 2021-12-27 |
| 申请公布号 | CN114475600A |
| 申请公布日 | 2022-05-13 |
| 授权公布号 | CN114475600B |
| 授权公告日 | 2024-03-08 |
| 分类号 | B60W30/165;B60W40/107;B60W10/06;B60W10/18 |
| 分类 | 一般车辆; |
| 申请人名称 | 联创汽车电子有限公司 |
| 申请人地址 | 上海市浦东新区金吉路33弄4幢 |
专利法律状态
2024-03-08
授权
状态信息
授权
2022-05-31
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B60W30/165;申请日:20211227
2022-05-13
公布
状态信息
公布
摘要
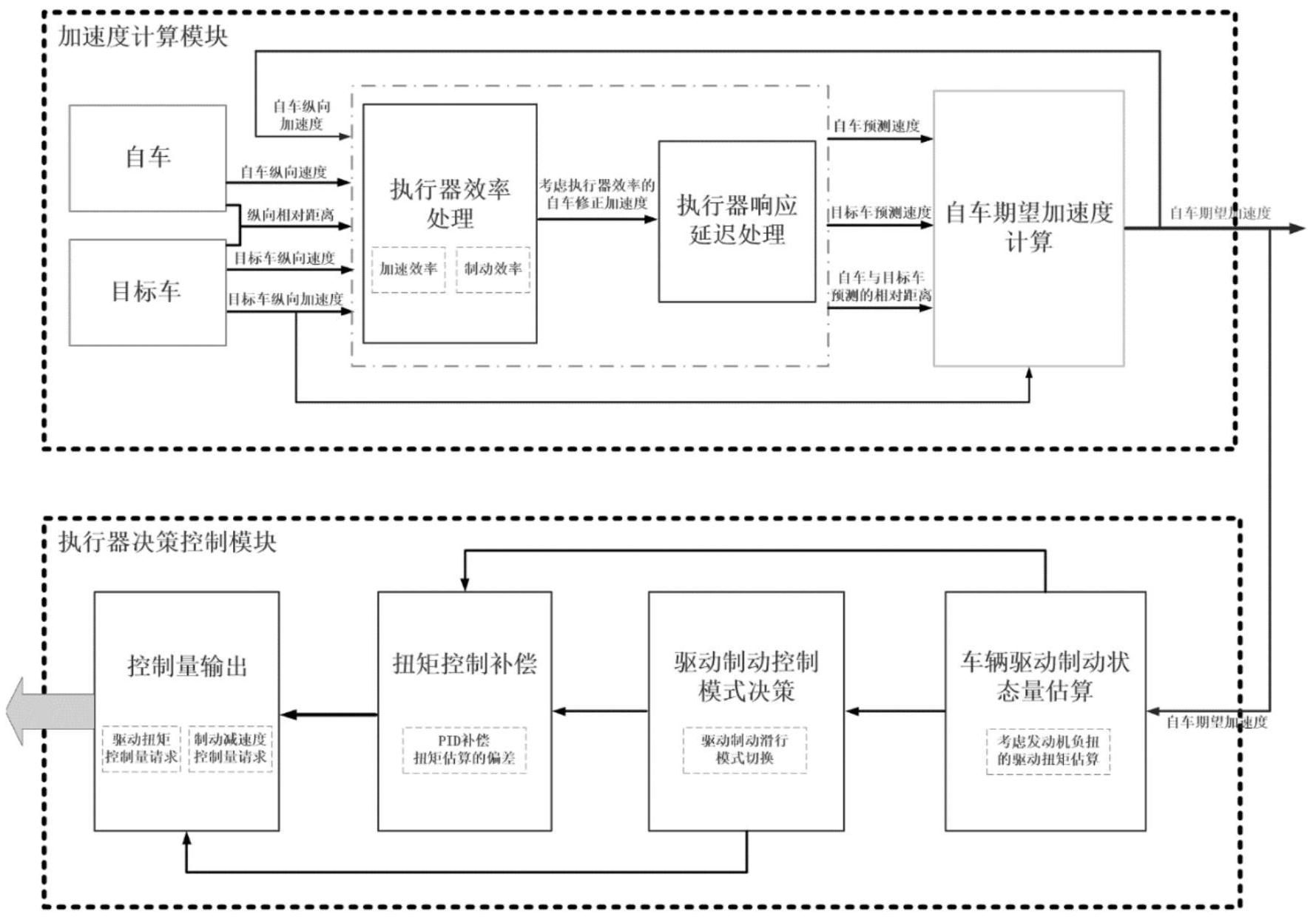
本发明公开了一种全速域ACC跟车控制方法和系统,包括:获取目标车运动信息和自车运动信息;加速效率补偿处理和制动效率补偿处理;执行器响应时延处理;计算得到自车期望加速度;根据实车运动状态和发动机扭矩实际响应值估算自车实际加速度并计算发动机扭矩前馈控制量、轮端扭矩前馈控制量和驱动制动响应切换特征量;根据驱动制动响应切换特征量判断车辆的行驶模式,做出驱动制动控制决策;根据当前时刻估算的自车实际加速度和期望加速度的差异补偿车辆轮端扭矩前馈控制量的不足,计算轮端扭矩补偿控制量;分别输出驱动扭矩控制量和制动减速度控制量。本发明提高了全速域的跟车稳定性,尤其提高了极低速稳定跟车控制效果,改善了拥堵工况下极低速跟车的乘坐舒适性和行驶稳定性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有