

授权公布号:CN111811535B
用于动态标定MEMS陀螺仪的方法和装置以及陀螺仪
有效
申请
2019-04-12
申请公布
2020-10-23
授权
2024-03-12
预估到期
2039-04-12
| 申请号 | CN201910294722.5 |
| 申请日 | 2019-04-12 |
| 申请公布号 | CN111811535A |
| 申请公布日 | 2020-10-23 |
| 授权公布号 | CN111811535B |
| 授权公告日 | 2024-03-12 |
| 分类号 | G01C25/00ICN102706364A,2012.10.03;CN103968837A,2014.08.06;CN106482750A,2017.03.08;US5367898A,1994.11.29尹爱昌.基于GPS/DR的车辆导航中在线计算陀螺仪参数的一种方法.《电子器件》.2007,第第30卷卷(第第1期期),第177-179页.;Bidaud,P等.DYNAMICCALIBRATIONOFAGYROSCOPEUSINGACOMPOUNDPENDULUM.《FIELDROBOTICS》.201 |
| 分类 | 测量;测试; |
| 申请人名称 | 上汽通用汽车有限公司 |
| 申请人地址 | 上海市(上海)自由贸易试验区申江路1500号 |
专利法律状态
2024-03-12
授权
状态信息
授权
2020-11-27
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C25/00;申请日:20190412
2020-10-23
公布
状态信息
公布
摘要
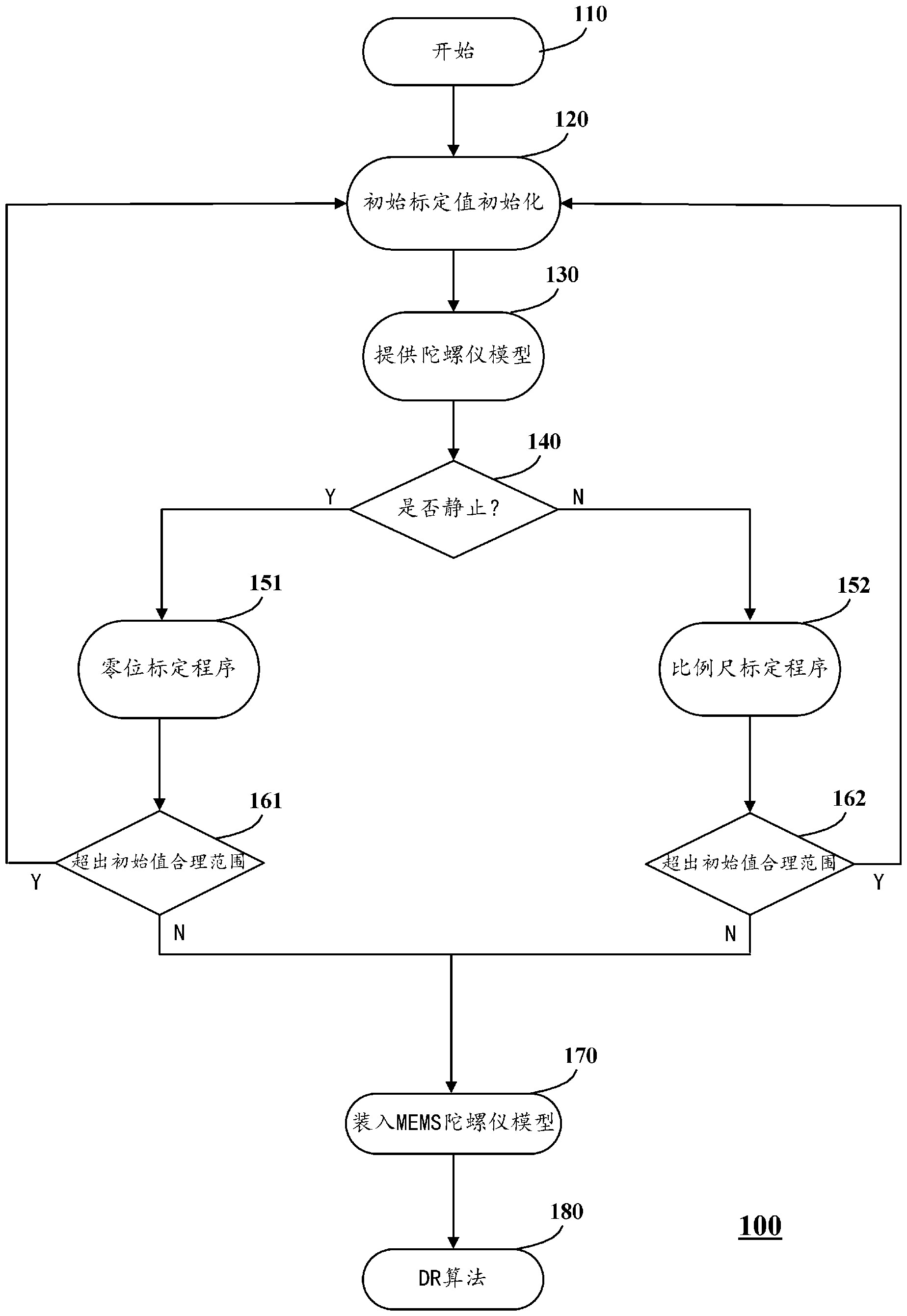
本发明涉及一种动态标定陀螺仪的方法、装置和一种陀螺仪。用于动态标定微电子机械系统MEMS陀螺仪的方法包括下列步骤:为MEMS陀螺仪提供以下模型:,其中为车辆的角速度,A为第一比例尺,B为第二比例尺,D为陀螺原始输出的电压信号,陀螺零偏D0为陀螺静止时输出的电压信号;判断车辆处于静止状态还是非静止状态;以及当判断车辆达到非静止状态时,进行比例尺标定过程,在比例尺标定过程中根据、D和D0的改变而得到A和B。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有