

授权公布号:CN111160266B
物体跟踪方法和装置
有效
申请
2019-12-30
申请公布
2020-05-15
授权
2023-04-18
预估到期
2039-12-30
| 申请号 | CN201911401940.0 |
| 申请日 | 2019-12-30 |
| 申请公布号 | CN111160266A |
| 申请公布日 | 2020-05-15 |
| 授权公布号 | CN111160266B |
| 授权公告日 | 2023-04-18 |
| 分类号 | G06V20/58;G06V20/40;G06V10/84;G06V10/26 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 三一重工股份有限公司 |
| 申请人地址 | 北京市昌平区北清路8号6幢5楼 |
专利法律状态
2023-04-18
授权
状态信息
授权
2020-05-15
公布
状态信息
公布
摘要
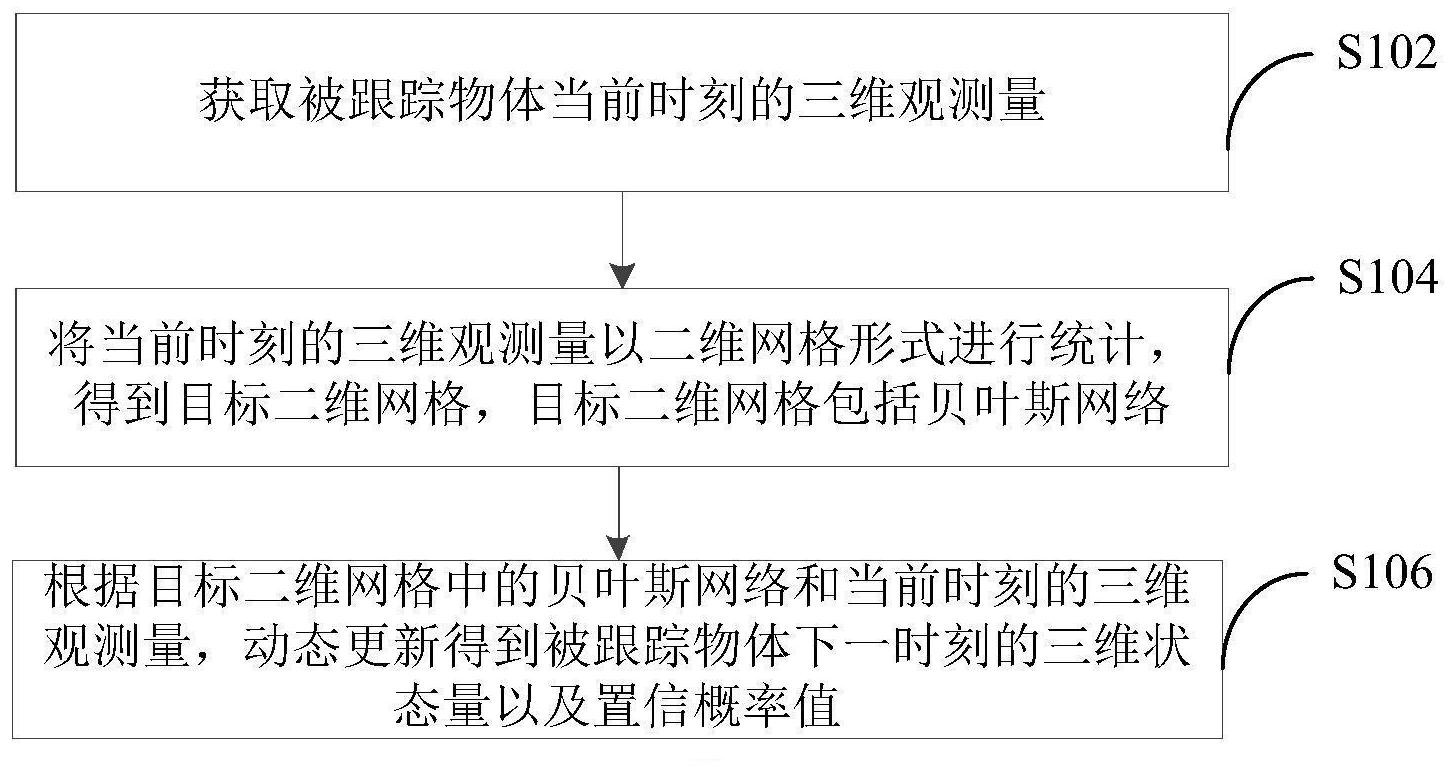
本发明提供了一种物体跟踪方法和装置,涉及无人驾驶的技术领域,包括获取被跟踪物体当前时刻的三维观测量;将当前时刻的三维观测量以二维网格形式进行统计,得到目标二维网格,目标二维网格包括贝叶斯网络;根据目标二维网格中的贝叶斯网络和当前时刻的三维观测量进行动态更新,得到被跟踪物体下一时刻的三维状态量以及置信概率值,通过对被跟踪物体的状态量进行动态更新,在被跟踪车辆被遮挡或被跟踪车辆距离较远的情况下,也能够预测到被跟踪物体的位置、速度等状态量,更加准确地进行跟踪,以保证无人驾驶的安全可靠性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有