

授权公布号:CN115012467B
一种挖掘机回转平台与工作装置动作匹配控制系统
有效
申请
2022-06-17
申请公布
2022-09-06
授权
2023-12-19
预估到期
2042-06-17
| 申请号 | CN202210688933.9 |
| 申请日 | 2022-06-17 |
| 申请公布号 | CN115012467A |
| 申请公布日 | 2022-09-06 |
| 授权公布号 | CN115012467B |
| 授权公告日 | 2023-12-19 |
| 分类号 | E02F9/08;E02F9/12;E02F9/22;E02F3/36 |
| 分类 | 水利工程;基础;疏浚; |
| 申请人名称 | 山河智能装备股份有限公司 |
| 申请人地址 | 湖南省长沙市长沙经济技术开发区凉塘东路1335号 |
专利法律状态
2023-12-19
授权
状态信息
授权
2022-09-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):E02F9/08;申请日:20220617
2022-09-06
公布
状态信息
公布
摘要
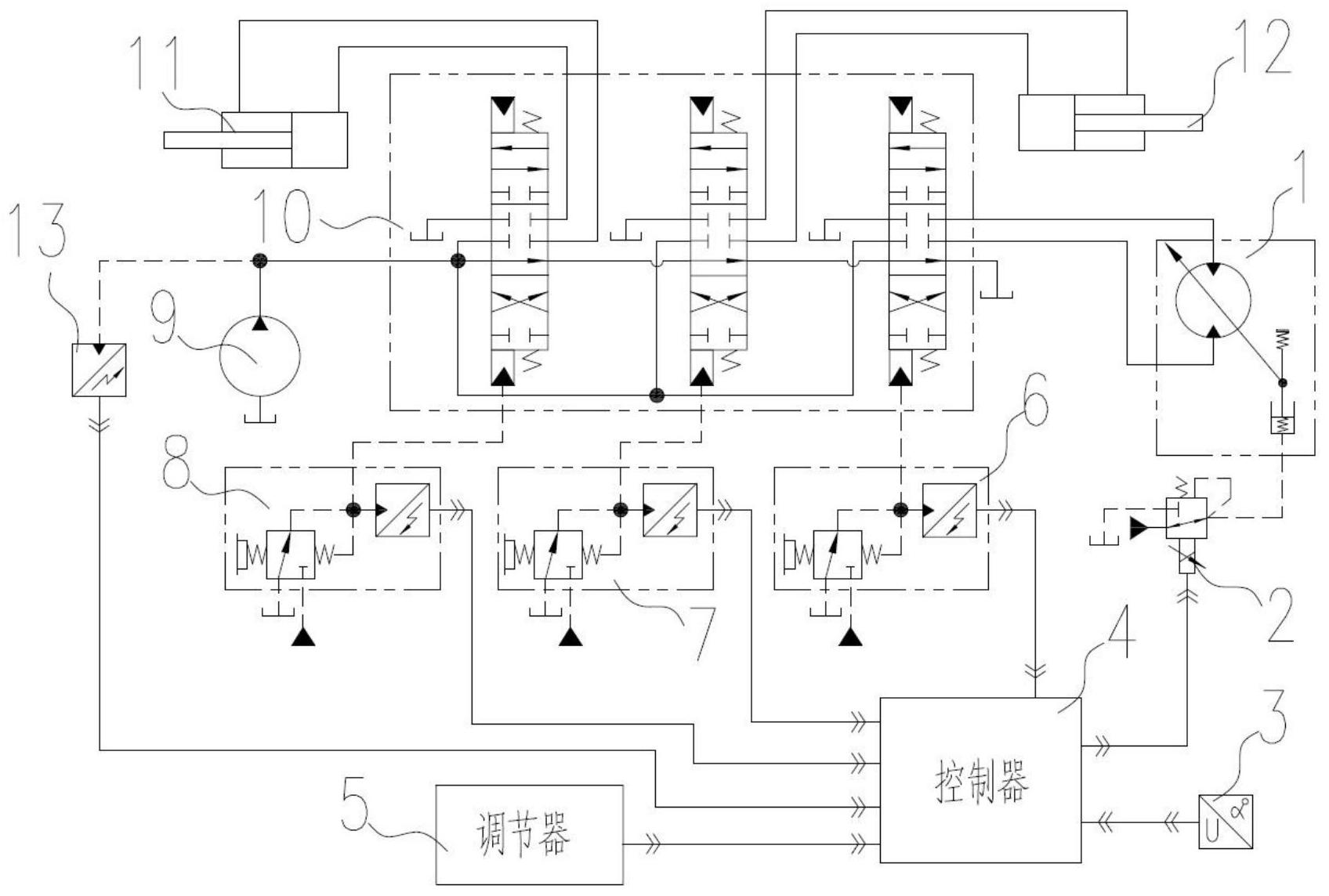
本申请公开了一种挖掘机回转平台与工作装置动作匹配控制系统,包括:回转马达、排量控制阀、控制器、回转先导操作组件、工作装置先导操作组件、液压泵、工作控制阀、回转控制阀、工作缸;控制器用于通过排量控制阀控制回转马达的排量,通过调节回转马达排量的方式,可以实现对回转平台与工作装置复合动作时回转马达与工作缸的速度匹配控制或是流量匹配控制,此外还可实现机器在斜坡上工作比不在斜坡上工作时,对回转马达驱动扭矩增加的控制;控制器还可根据各先导操作组件的先导信号控制回转控制阀和工作控制阀的阀芯开口面积,以实现对回转马达和工作缸复合工作时的速度匹配控制和流量匹配控制。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有