

授权公布号:CN106774366B
一种仿生无人车控制系统及其控制方法
有效
申请
2016-12-23
申请公布
2017-05-31
授权
2023-06-02
预估到期
2036-12-23
| 申请号 | CN201611207990.1 |
| 申请日 | 2016-12-23 |
| 申请公布号 | CN106774366A |
| 申请公布日 | 2017-05-31 |
| 授权公布号 | CN106774366B |
| 授权公告日 | 2023-06-02 |
| 分类号 | G05D1/08;G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 山河智能装备股份有限公司 |
| 申请人地址 | 湖南省长沙市长沙经济技术开发区凉塘东路1335号山河智能工业城 |
专利法律状态
2023-06-02
授权
状态信息
授权
2022-09-20
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):G05D1/08;专利申请号:2016112079901;登记生效日:20220907;变更事项:申请人;变更前权利人:山河智能装备股份有限公司;变更后权利人:山河智能特种装备有限公司;变更事项:地址;变更前权利人:410100 湖南省长沙市长沙经济技术开发区漓湘中路16号山河智能产业园;变更后权利人:410100 湖南省长沙市长沙经济技术开发区凉塘东路1335号山河智能工业城;变更事项:申请人;变更前权利人:;变更后权利人:山河智能装备股份有限公司
2017-06-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/08;申请日:20161223
2017-05-31
发明专利申请公布
状态信息
公布
摘要
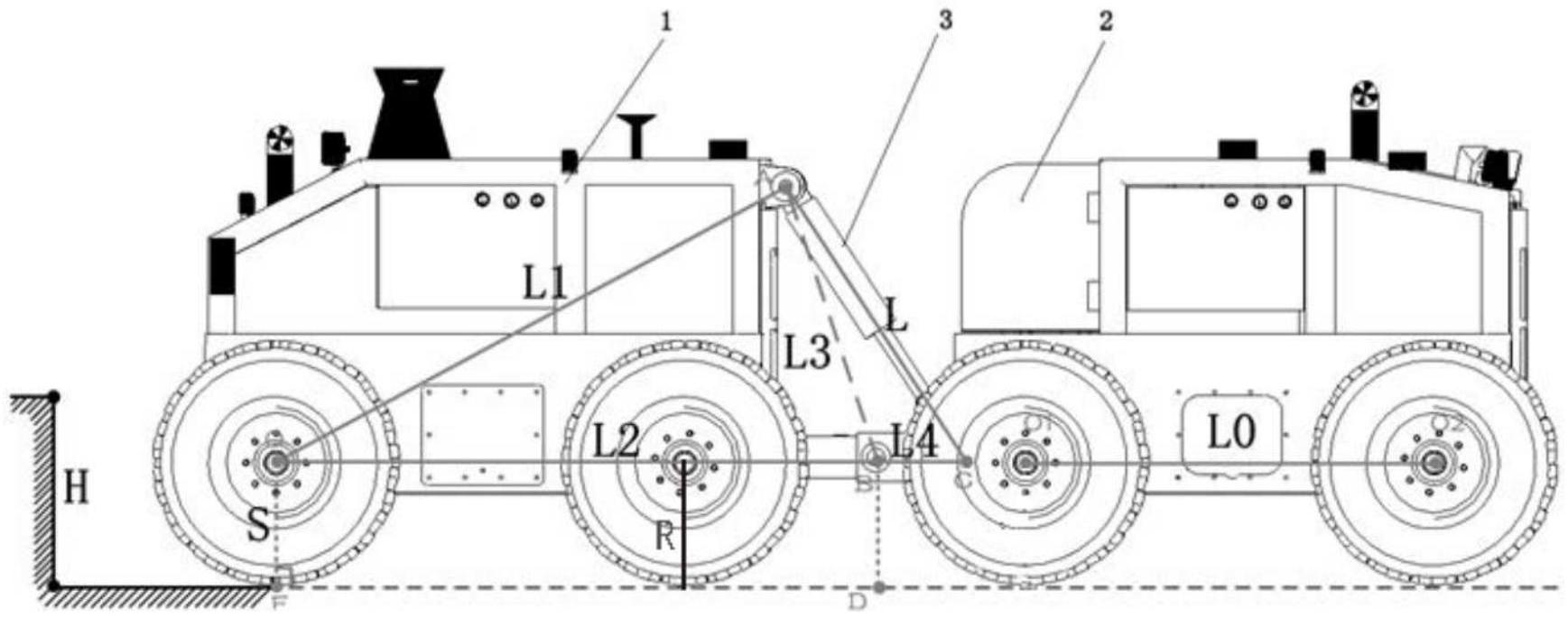
一种仿生无人车控制系统及其控制方法,以解决目前对无人车操作控制主要是通过遥控命令来实现,而在实际的使用过程中需要遥控的命令太多而造成操作不便的问题。该控制系统可概括为三大部分:信息采集系统、数据处理系统、命令执行系统。本发明提出的技术方案可通过遥控操作系统对工作模式进行选择,控制系统结合传感器采集信息自动对仿生无人车的行进姿态进行调节,提高仿生无人车的智能化水平,同时也提高了仿生无人车对复杂地形的适应能力。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有