

授权公布号:CN114212744B
一种高空作业平台及其可调底盘配重机构
有效
申请
2021-12-27
申请公布
2022-03-22
授权
2023-12-19
预估到期
2041-12-27
| 申请号 | CN202111615794.9 |
| 申请日 | 2021-12-27 |
| 申请公布号 | CN114212744A |
| 申请公布日 | 2022-03-22 |
| 授权公布号 | CN114212744B |
| 授权公告日 | 2023-12-19 |
| 分类号 | B66F11/04;B66F13/00;F16F15/28 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 山河智能装备股份有限公司 |
| 申请人地址 | 湖南省长沙市长沙经济技术开发区凉塘东路1335号 |
专利法律状态
2023-12-19
授权
状态信息
授权
2022-04-08
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B66F11/04;申请日:20211227
2022-03-22
公布
状态信息
公布
摘要
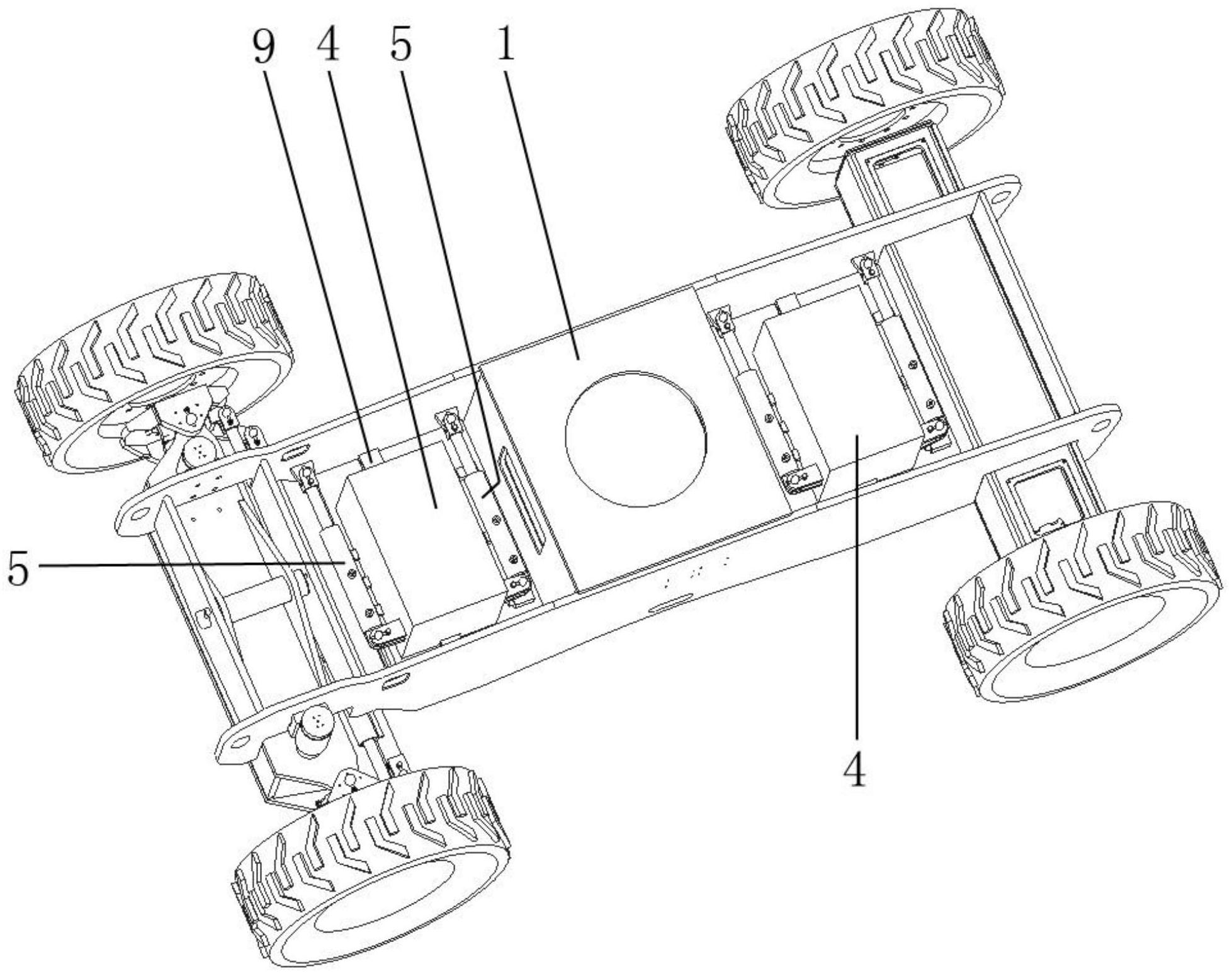
本发明公开一种可调底盘配重机构,包括底盘,还包括可移动地设置于底盘上的配重块、设置于底盘上并用于驱动配重块沿底盘的宽度方向往复运动的驱动部件、用于检测底盘相对于地面的倾斜角度的第一角度传感器、用于检测臂架相对于底盘的变幅角度的第二角度传感器,以及与第一角度传感器、第二角度传感器、驱动部件的控制端信号连接的控制器,控制器用于通过预设公式计算配重块相对于底盘的宽度方向中心的目标移动距离,并据此控制驱动部件对配重块的驱动状态。本发明利用控制器调节底盘的重心位置,使高空作业平台趋于力矩平衡状态,能够在无需降低臂架的变幅角度的基础上,提高后倾稳定性。本发明还公开一种高空作业平台,其有益效果如上所述。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有