

授权公布号:CN113781561B
基于自适应高斯权快速点特征直方图的目标位姿估计方法
有效
申请
2021-09-09
申请公布
2021-12-10
授权
2023-10-27
预估到期
2041-09-09
| 申请号 | CN202111058954.4 |
| 申请日 | 2021-09-09 |
| 申请公布号 | CN113781561A |
| 申请公布日 | 2021-12-10 |
| 授权公布号 | CN113781561B |
| 授权公告日 | 2023-10-27 |
| 分类号 | G06T7/73;G06V10/50;G06V10/46;G06T7/33 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 诺力智能装备股份有限公司 |
| 申请人地址 | 浙江省湖州市长兴县太湖街道长州路528号 |
专利法律状态
2023-10-27
授权
状态信息
授权
2021-12-28
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T7/73;申请日:20210909
2021-12-10
公布
状态信息
公布
摘要
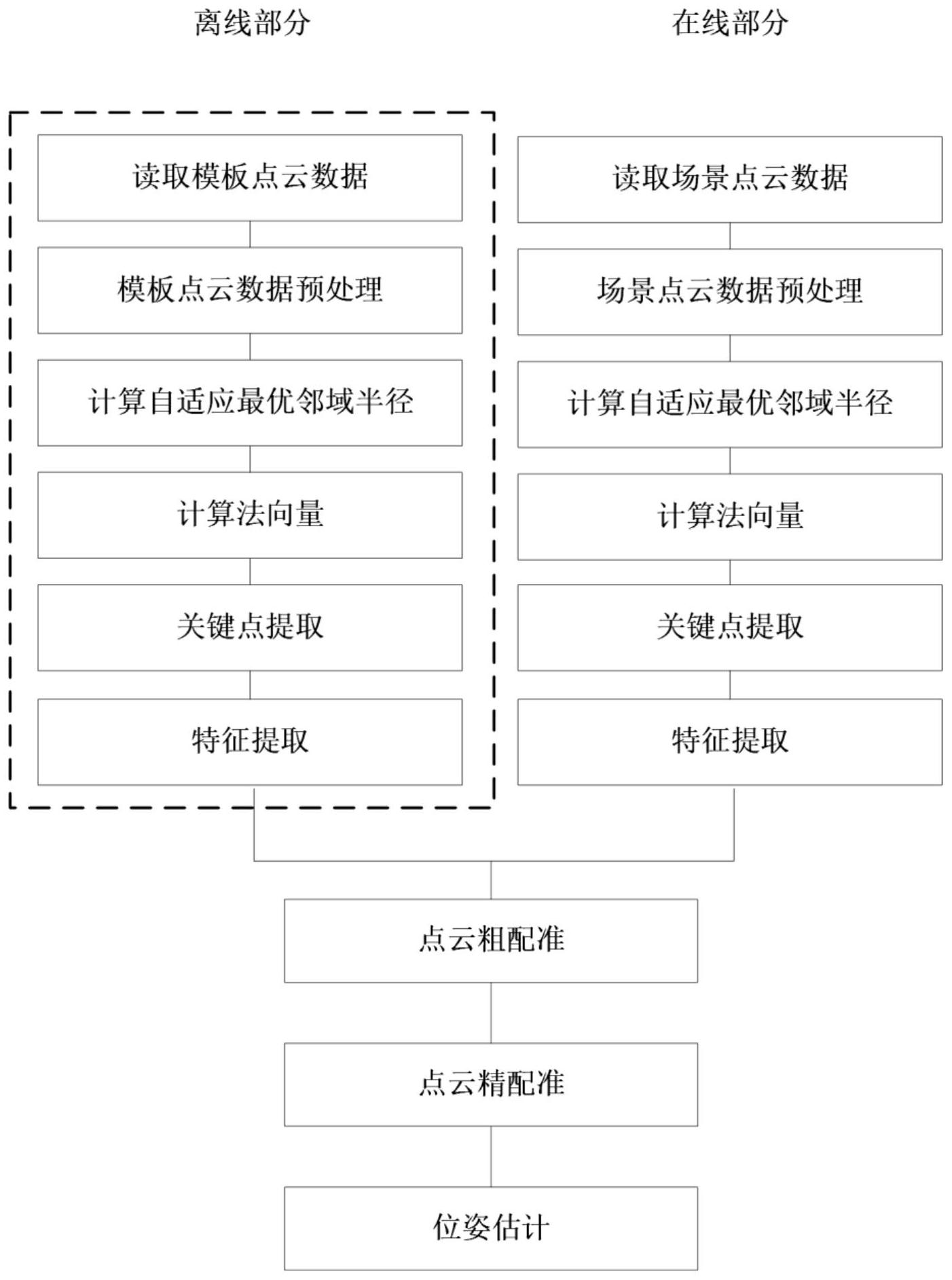
本发明公开了基于自适应高斯权快速点特征直方图的目标位姿估计方法,具体包括以下步骤:步骤S1:读取点云数据;步骤S2:数据预处理;步骤S3:获取自适应最优邻域半径;步骤S4:计算法向量;步骤S5:关键点提取;步骤S6:特征提取;步骤S7:点云粗配准;步骤S8:点云精配准;步骤S9:位姿估计。基于邻域特征熵,确定特征提取的自适应最优邻域半径,同时计算关键点和邻域点之间的距离均值和方差,构建新的特征描述符的高斯权函数,使得每个邻域点的权值设定能够更准确地描述邻域点对于关键点特征的影响。采用该方法使整个位姿估计过程精度和效率更高,鲁棒性更强。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有