

授权公布号:CN111113022B
一种自动拼装啮合装置
有效
申请
2019-12-31
申请公布
2020-05-08
授权
2021-10-26
预估到期
2039-12-31
| 申请号 | CN201911410349.1 |
| 申请日 | 2019-12-31 |
| 申请公布号 | CN111113022A |
| 申请公布日 | 2020-05-08 |
| 授权公布号 | CN111113022B |
| 授权公告日 | 2021-10-26 |
| 分类号 | B23P21/00;B25B11/02 |
| 分类 | 机床;不包含在其他类目中的金属加工; |
| 申请人名称 | 柯马(上海)工程有限公司 |
| 申请人地址 | 上海市松江区泗泾工业园区九干路1353号 |
专利法律状态
2021-10-26
授权
状态信息
授权
2020-06-02
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B23P21/00;申请日:20191231
2020-05-08
公布
状态信息
公布
摘要
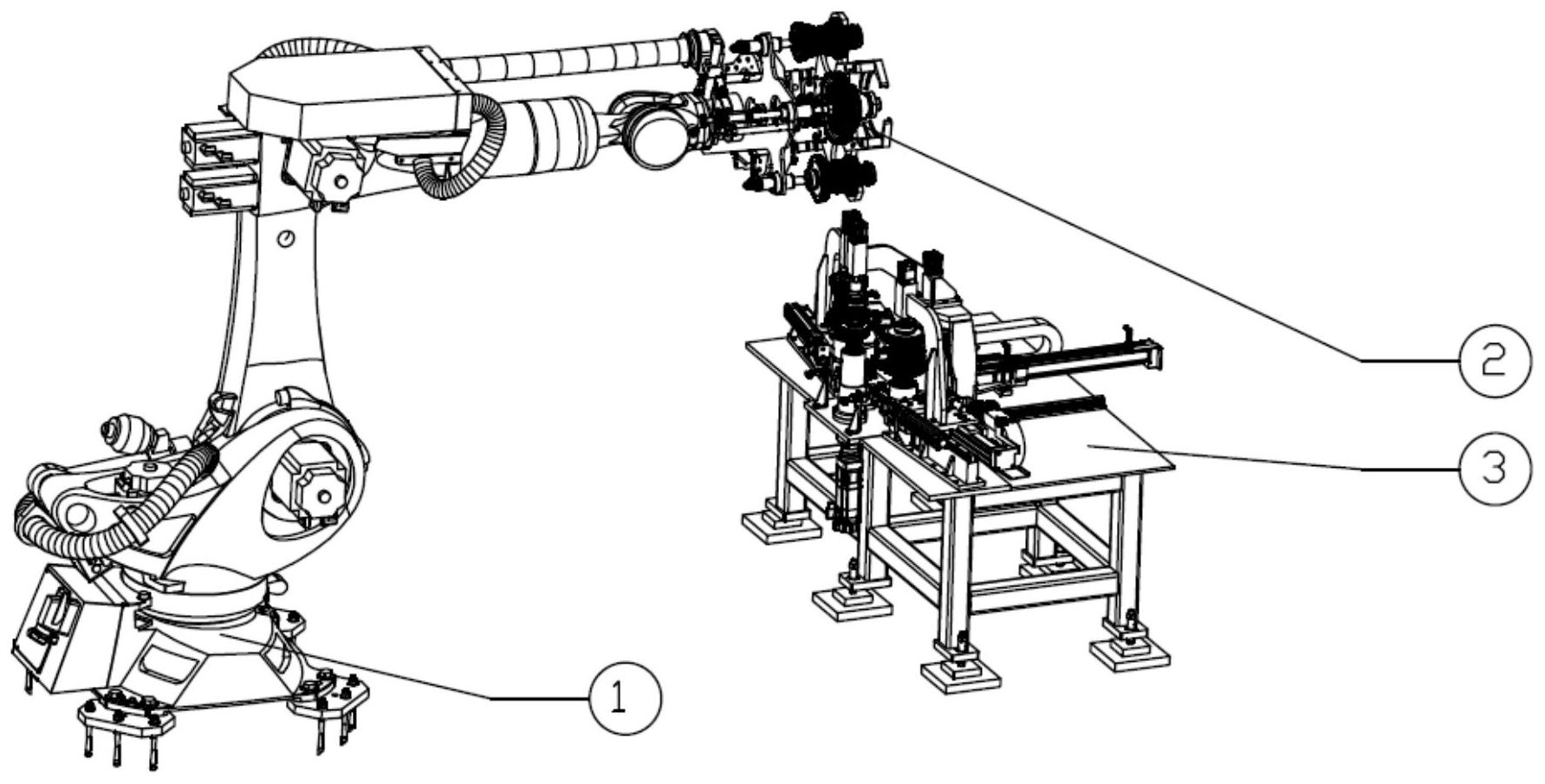
本发明公开了一种自动拼装啮合装置。其特征在于:包括自动取放料机构、拼装啮合工作台及其上的移动式定位支座机构、随动式顶尖定位机构、伺服驱动旋转机构、自动对花键机构等。使用机器人及一体式取放料夹爪自动上下料,节省了节拍,降低了人工成本,减轻了劳动强度。移动式定位支座能使拼装啮合过程同步进行,提高了装配效率。随动式顶尖定位机构既能在取放料阶段提供避让空间,又能在拼装啮合过程中使各轴系及差速器定位,使装配质量可靠,一致性高。伺服驱动旋转机构集成了自动对花键齿结构,使所有环节实现了全自动化工作,降低了人工成本,提高了装配效率,提高装配质量。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有