

授权公布号:CN108247613B
一种双手爪
有效
申请
2018-02-12
申请公布
2018-07-06
授权
2024-01-23
预估到期
2038-02-12
| 申请号 | CN201810147176.8 |
| 申请日 | 2018-02-12 |
| 申请公布号 | CN108247613A |
| 申请公布日 | 2018-07-06 |
| 授权公布号 | CN108247613B |
| 授权公告日 | 2024-01-23 |
| 分类号 | B25J9/00;B25J9/20 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 上海发那科机器人有限公司 |
| 申请人地址 | 上海市宝山区富联路1500号 |
专利法律状态
2024-01-23
授权
状态信息
授权
2018-07-31
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/00;申请日:20180212
2018-07-06
公布
状态信息
公布
摘要
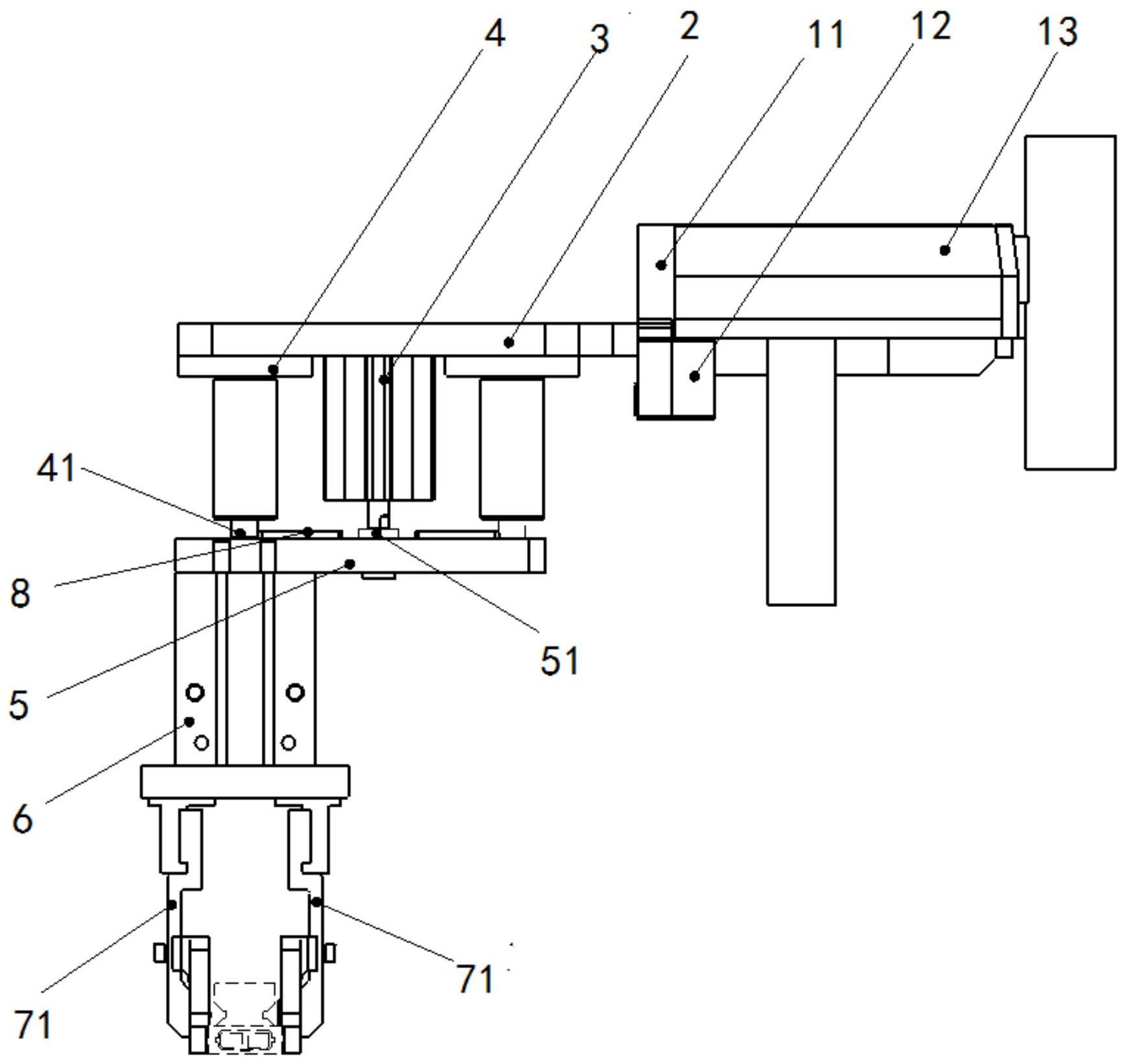
本发明公开了一种双手爪,包括:相机通过相机固定板固定于连接板的右端面。机器人连接法兰的右侧连接连接板的左侧。浮动气缸的上端连接于机器人连接法兰的下端面,两直线轴承位于浮动气缸的左右方向的两侧。导向轴与直线轴承滑动连接;导向轴的下端连接浮动板。浮动接头的上端置于浮动气缸内,并且浮动接头的下端连接于浮动板。夹紧机构的上端固定连接于浮动板的下端面。两第一手指的上端固定连接于浮动板的下端面;夹紧机构控制两第一手指相向或相背运动。每一第二手指设置于第一手指正对于另一第一手指的端面。本发明的双手爪的两第一手指和两第二手指设计紧凑,并且可采用一个夹紧气缸进行工作,减少了多气缸的成本。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有