

授权公布号:CN113601075B
一种四台机器人协调跟踪标准焊接系统
有效
申请
2021-07-29
申请公布
2021-11-05
授权
2023-02-24
预估到期
2041-07-29
| 申请号 | CN202110865496.9 |
| 申请日 | 2021-07-29 |
| 申请公布号 | CN113601075A |
| 申请公布日 | 2021-11-05 |
| 授权公布号 | CN113601075B |
| 授权公告日 | 2023-02-24 |
| 分类号 | B25J19/04;B23K37/02;B23K37/04 |
| 分类 | 机床;不包含在其他类目中的金属加工; |
| 申请人名称 | 上海发那科机器人有限公司 |
| 申请人地址 | 上海市宝山区富联路1500号 |
专利法律状态
2023-02-24
授权
状态信息
授权
2021-11-05
公布
状态信息
公布
摘要
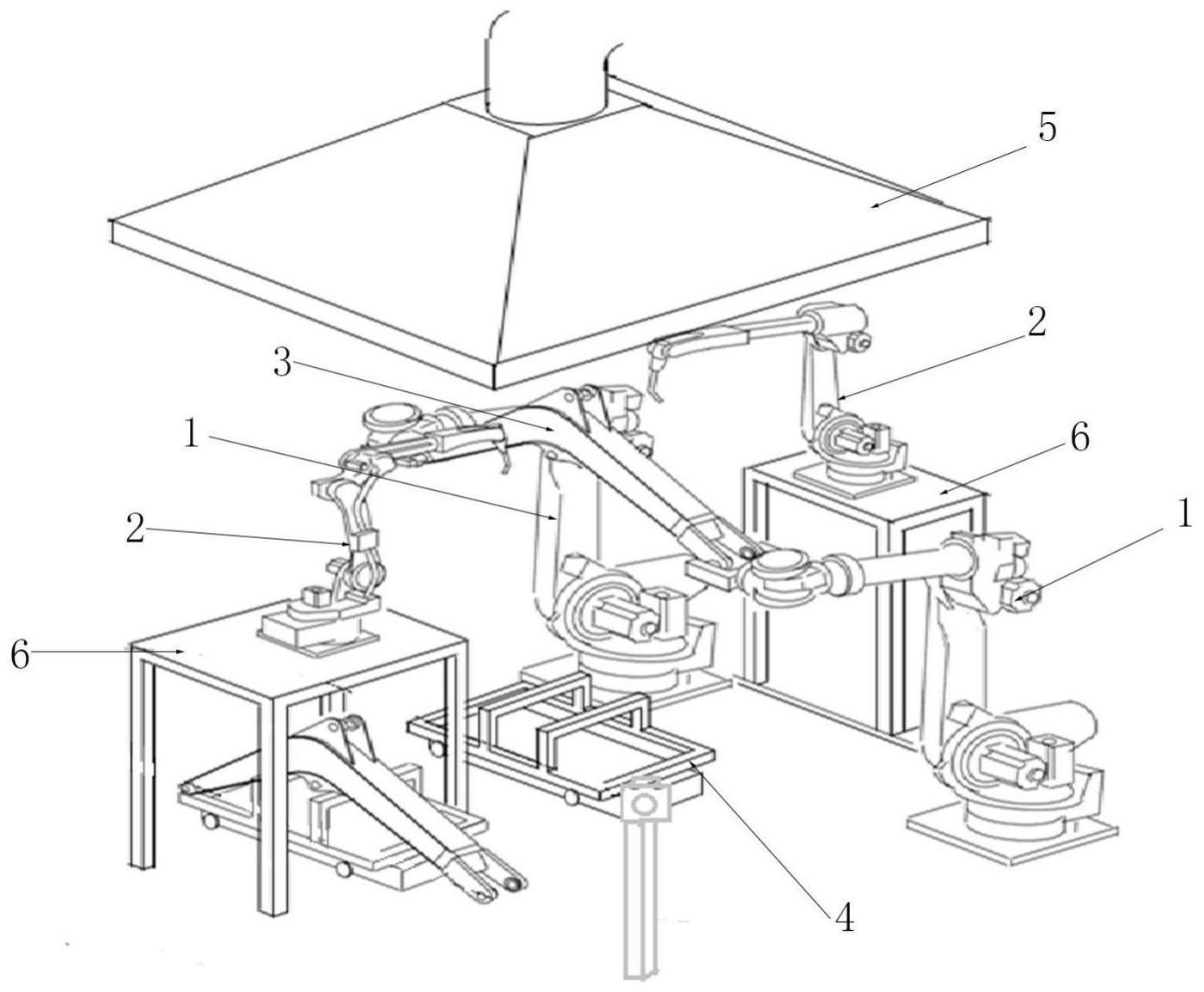
本发明公开一种四台机器人协调跟踪标准焊接系统,包括:两搬运机器人、两焊接机器人和控制器,两搬运机器人上均设有第一3D视觉系统,两焊接机器人上均设有第二3D视觉系统,两搬运机器人、两焊接机器人、两第一3D视觉系统、两第二3D视觉系统分别与控制器信号连接;第一3D视觉系统用于对工件的品种进行识别,并对工件进行定位,控制器控制两搬运机器人抓取、旋转工件,并调整工件至焊接姿态;第二3D视觉系统用于对工件上的焊缝进行定位,控制器控制两焊接机器人对工件上的焊缝的焊接起始点进行寻位,并对焊缝进行焊接。本发明可以适应多种尺寸工件进行搬运满足焊接,无需更换夹具问题,保证焊接质量,提高了焊接效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有