

授权公布号:CN114161420B
机器人组件及其控制方法、控制装置、可读存储介质
有效
申请
2021-12-13
申请公布
2022-03-11
授权
2023-11-14
预估到期
2041-12-13
| 申请号 | CN202111515216.8 |
| 申请日 | 2021-12-13 |
| 申请公布号 | CN114161420A |
| 申请公布日 | 2022-03-11 |
| 授权公布号 | CN114161420B |
| 授权公告日 | 2023-11-14 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 库卡机器人制造(上海)有限公司 |
| 申请人地址 | 上海市松江区小昆山镇昆港公路889号 |
专利法律状态
2023-11-14
授权
状态信息
授权
2022-03-29
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20211213
2022-03-11
公布
状态信息
公布
摘要
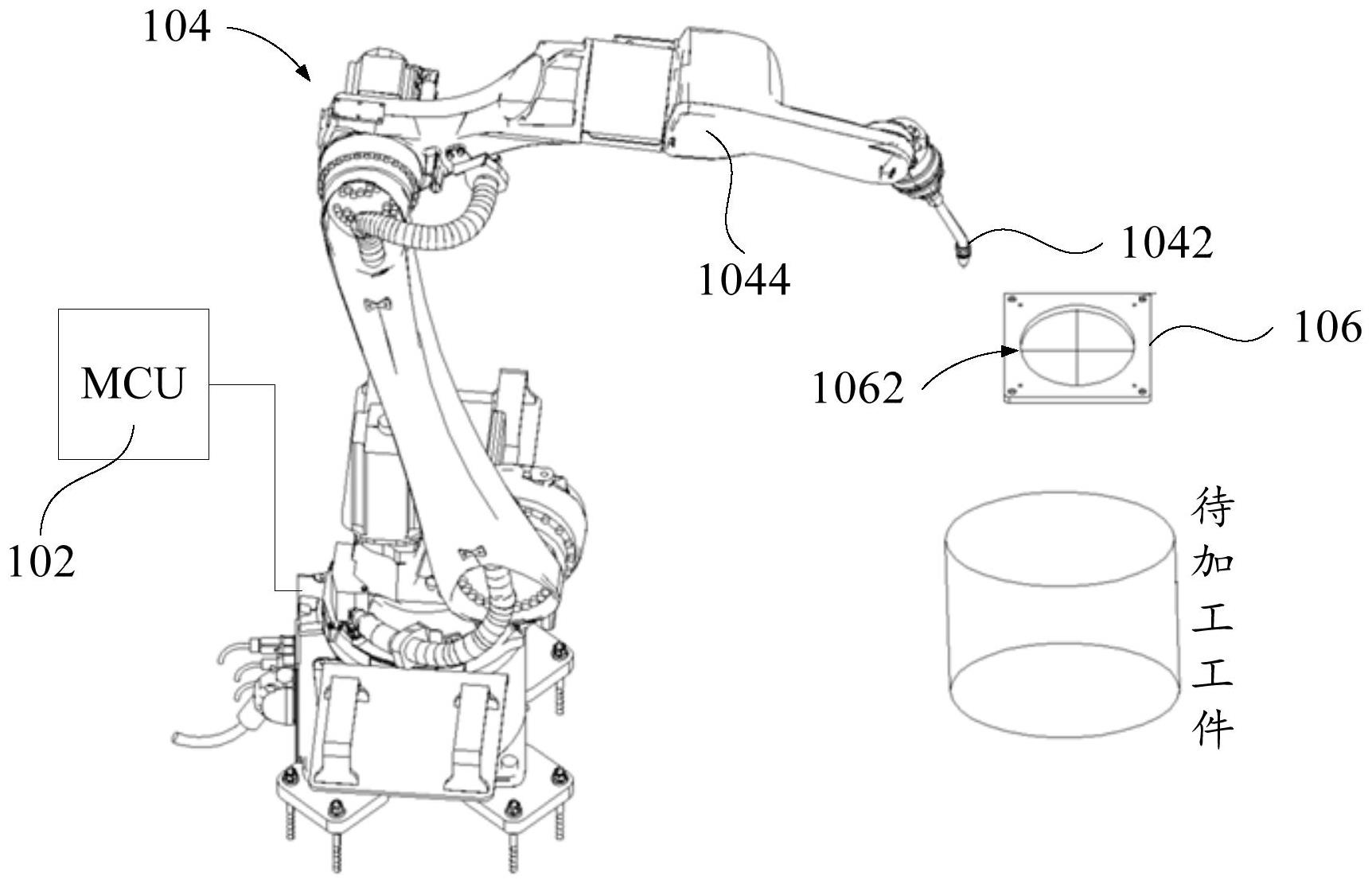
本发明提供了一种机器人组件及其控制方法、控制装置、可读存储介质。其中,机器人组件,包括:控制器;机器人本体,与控制器电连接,机器人本体上设置有工具;位置检测装置,与控制器电连接,用于采集工具的位置信息;输入设备,与控制器电连接,用于根据触发输入生成校准信号,控制器用于响应于校准信号,根据位置信息校准工具的坐标值。本发明实施例通过设置“一键校准”功能,对机器人的工具坐标值进行自动校准,从而保证工具坐标值准确无误,能够保证机器人的加工精度,提高机器人的工作效率和加工良品率。且该过程中无需操作人员手动校准,有效地减少了校准工作的耗时,提高了校准效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有