

授权公布号:CN113703461B
路径确定方法、装置、机器人和可读存储介质
有效
申请
2021-08-31
申请公布
2021-11-26
授权
2023-10-27
预估到期
2041-08-31
| 申请号 | CN202111014618.X |
| 申请日 | 2021-08-31 |
| 申请公布号 | CN113703461A |
| 申请公布日 | 2021-11-26 |
| 授权公布号 | CN113703461B |
| 授权公告日 | 2023-10-27 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 库卡机器人制造(上海)有限公司 |
| 申请人地址 | 上海市松江区小昆山镇昆港公路889号 |
专利法律状态
2023-10-27
授权
状态信息
授权
2021-12-14
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20210831
2021-11-26
公布
状态信息
公布
摘要
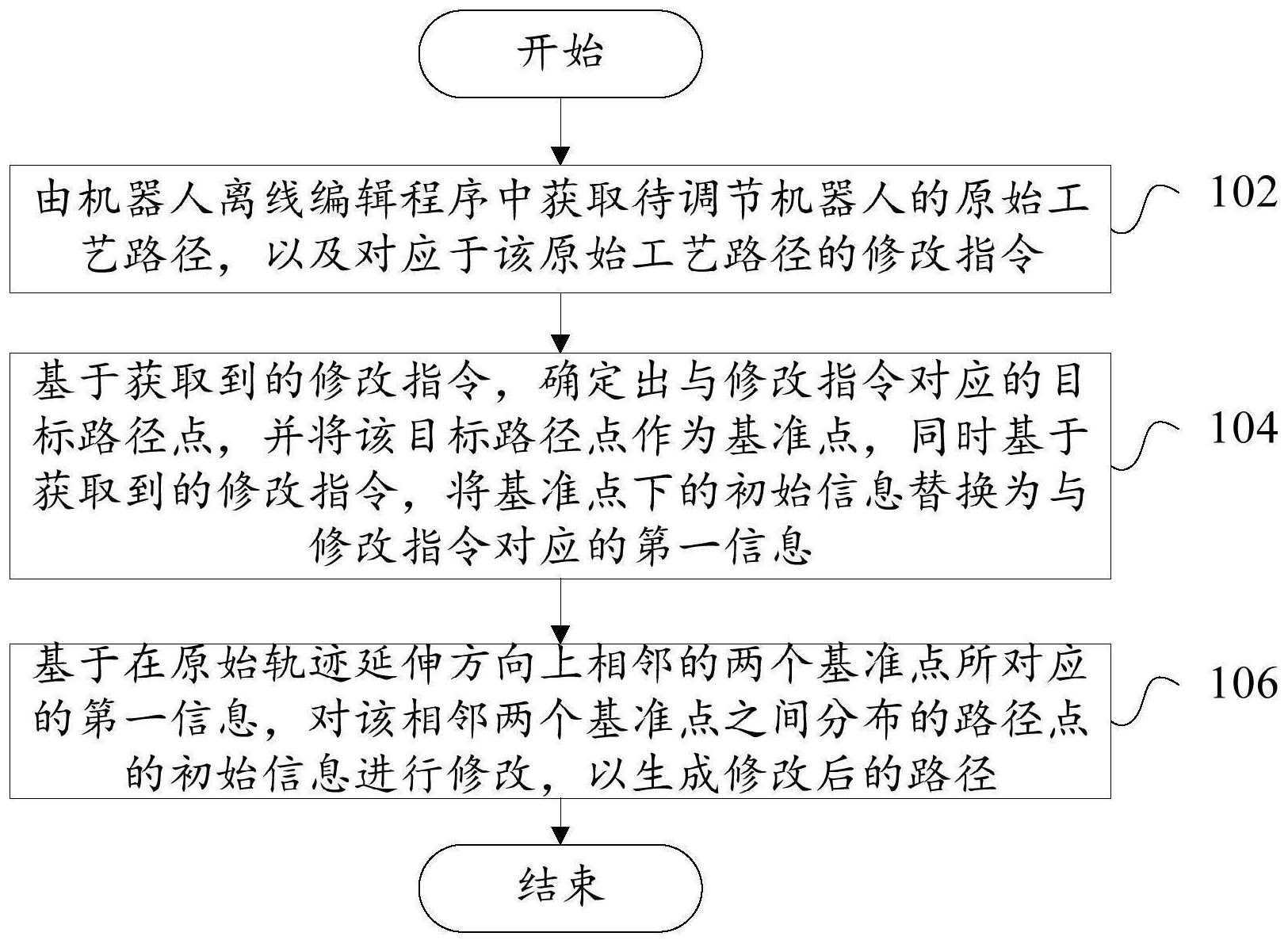
本发明提供了一种路径确定方法、装置、机器人和可读存储介质。路径确定方法包括:获取机器人的原始路径和修改指令,其中原始路径包括至少三个路径点的初始信息;根据修改指令将至少两个不相邻的路径点作为基准点,并将基准点的初始信息修改为第一信息;根据相邻的两个基准点的第一信息修改相邻的两个基准点间的中间路径点的初始信息,以得到修改后的路径。从而解决人工手动逐个编辑每个剩余路径点所引起的消耗时间过多、无法精确地保证路径点之间差异的平滑性、在实际使用过程中对于整段路径的调节不便利,调节操作灵活性差的技术问题。实现优化路径确定方法,提高路径修改效率,提升修改后的路径的可靠性,提升用户使用体验的技术效果。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有