

授权公布号:CN114161418B
机器人的工具坐标的校准方法和装置、机器人和存储介质
有效
申请
2021-12-13
申请公布
2022-03-11
授权
2023-10-24
预估到期
2041-12-13
| 申请号 | CN202111514949.X |
| 申请日 | 2021-12-13 |
| 申请公布号 | CN114161418A |
| 申请公布日 | 2022-03-11 |
| 授权公布号 | CN114161418B |
| 授权公告日 | 2023-10-24 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 库卡机器人制造(上海)有限公司 |
| 申请人地址 | 上海市松江区小昆山镇昆港公路889号 |
专利法律状态
2023-10-24
授权
状态信息
授权
2022-03-11
公布
状态信息
公布
摘要
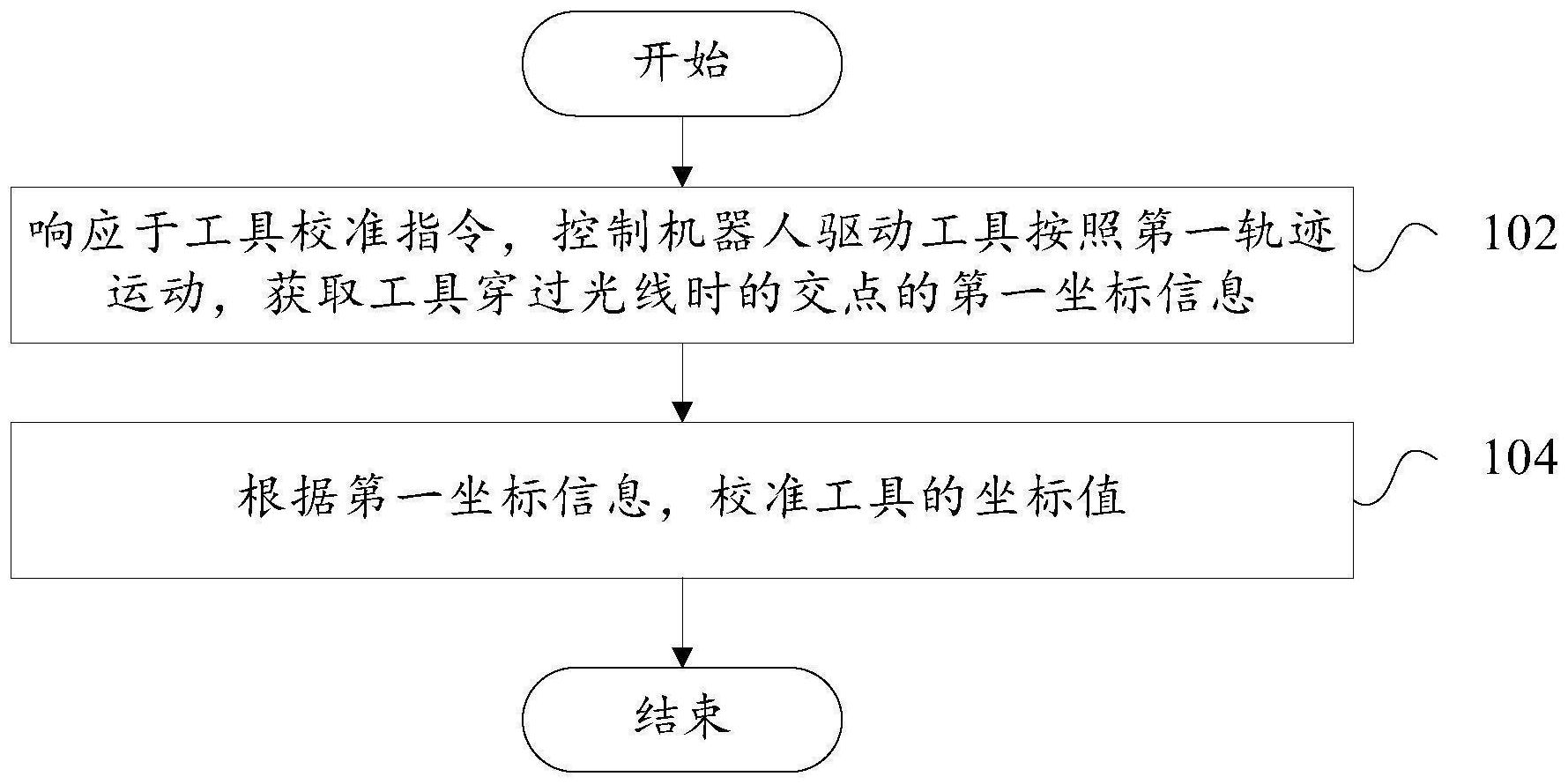
本发明提供了一种机器人的工具坐标的校准方法和装置、机器人和存储介质。其中,一种机器人的工具坐标的校准方法,机器人包括光电传感器,光电传感器用于产生光线,方法包括:响应于工具校准指令,控制机器人驱动工具按照第一轨迹运动,获取工具穿过光线时的交点的第一坐标信息;根据第一坐标信息,校准工具的坐标值。本申请通过在机器人的工具发生改变或碰撞,可能导致工具坐标发生变化时,对工具坐标进行自动的再校准,从而保证工具坐标值准确无误,能够保证机器人的加工精度,提高机器人的工作效率和加工良品率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有