

授权公布号:CN220348445U
机器人关节及机器人
有效
申请
2023-06-07
申请公布
1970-01-01
授权
2024-01-16
预估到期
2033-06-07
| 申请号 | CN202321449242.X |
| 申请日 | 2023-06-07 |
| 授权公布号 | CN220348445U |
| 授权公告日 | 2024-01-16 |
| 分类号 | B25J17/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 库卡机器人制造(上海)有限公司 |
| 申请人地址 | 上海市松江区小昆山镇昆港公路889号7幢、8幢、9幢、10幢、11幢 |
专利法律状态
2024-01-16
授权
状态信息
授权
摘要
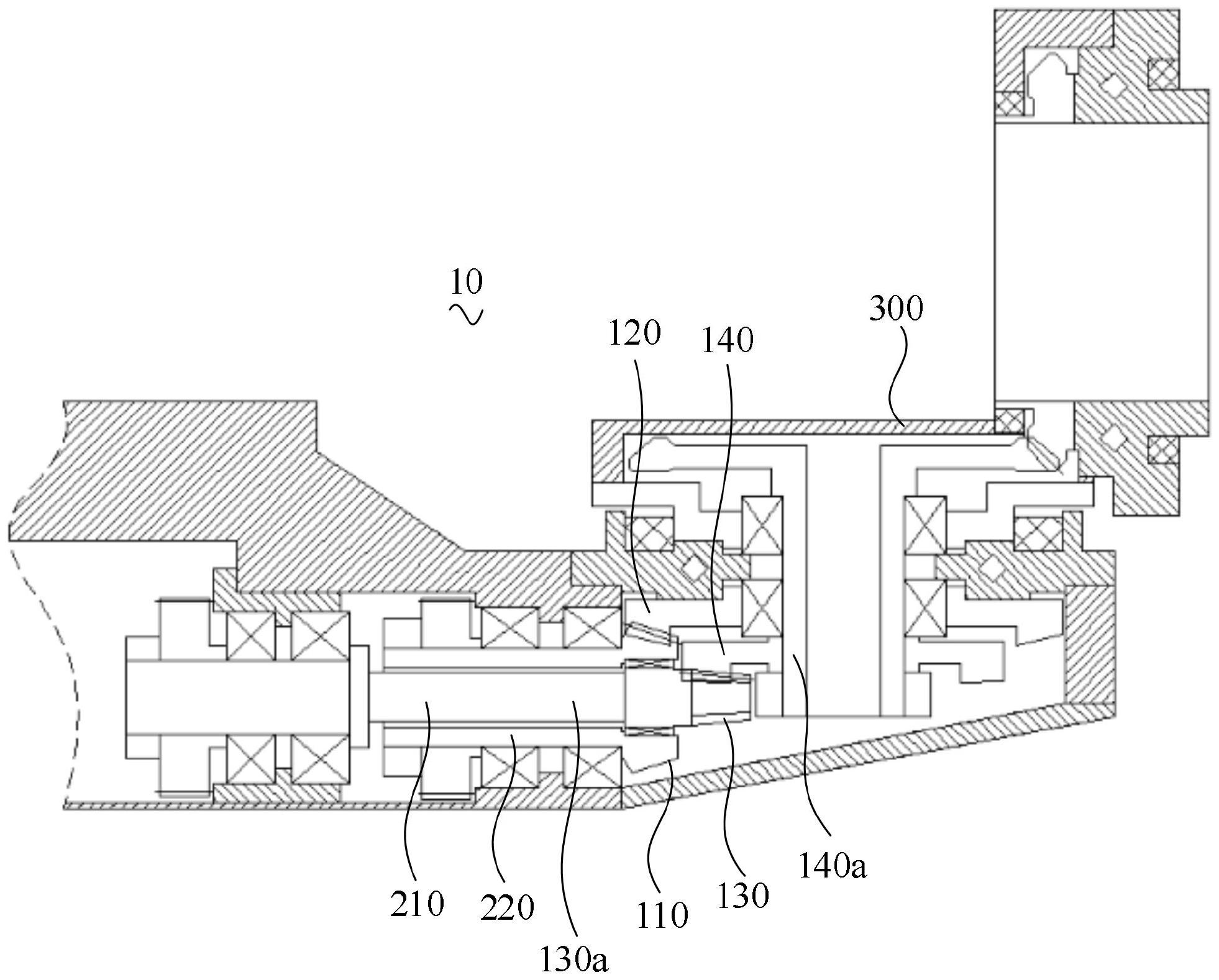
本实用新型提供一种机器人关节及机器人,机器人关节包括第一锥齿轮、第二锥齿轮、第三锥齿轮和第四锥齿轮,第一锥齿轮与第二锥齿轮相啮合,第三锥齿轮与第四锥齿轮相啮合,第三锥齿轮的轴体可转动地穿设于第一锥齿轮,第四锥齿轮的轴体可转动地穿设于第二锥齿轮。如此,第三锥齿轮的轴体可转动地穿设于第一锥齿轮,并且第四锥齿轮的轴体可转动地穿设于第二锥齿轮,使得第一锥齿轮和第三锥齿轮配合得较为紧凑,以及第二锥齿轮和第四锥齿轮的结构配合得较为紧凑,从而有助于减小机器人关节的体积,进而减小机器人的体积。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有