

授权公布号:CN218082781U
机器人关节及机器人
有效
申请
2022-10-08
申请公布
1970-01-01
授权
2022-12-20
预估到期
2032-10-08
| 申请号 | CN202222647715.9 |
| 申请日 | 2022-10-08 |
| 授权公布号 | CN218082781U |
| 授权公告日 | 2022-12-20 |
| 分类号 | B25J17/00;B25J9/10 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 库卡机器人制造(上海)有限公司 |
| 申请人地址 | 上海市松江区小昆山镇昆港公路889号 |
专利法律状态
2022-12-20
授权
状态信息
授权
摘要
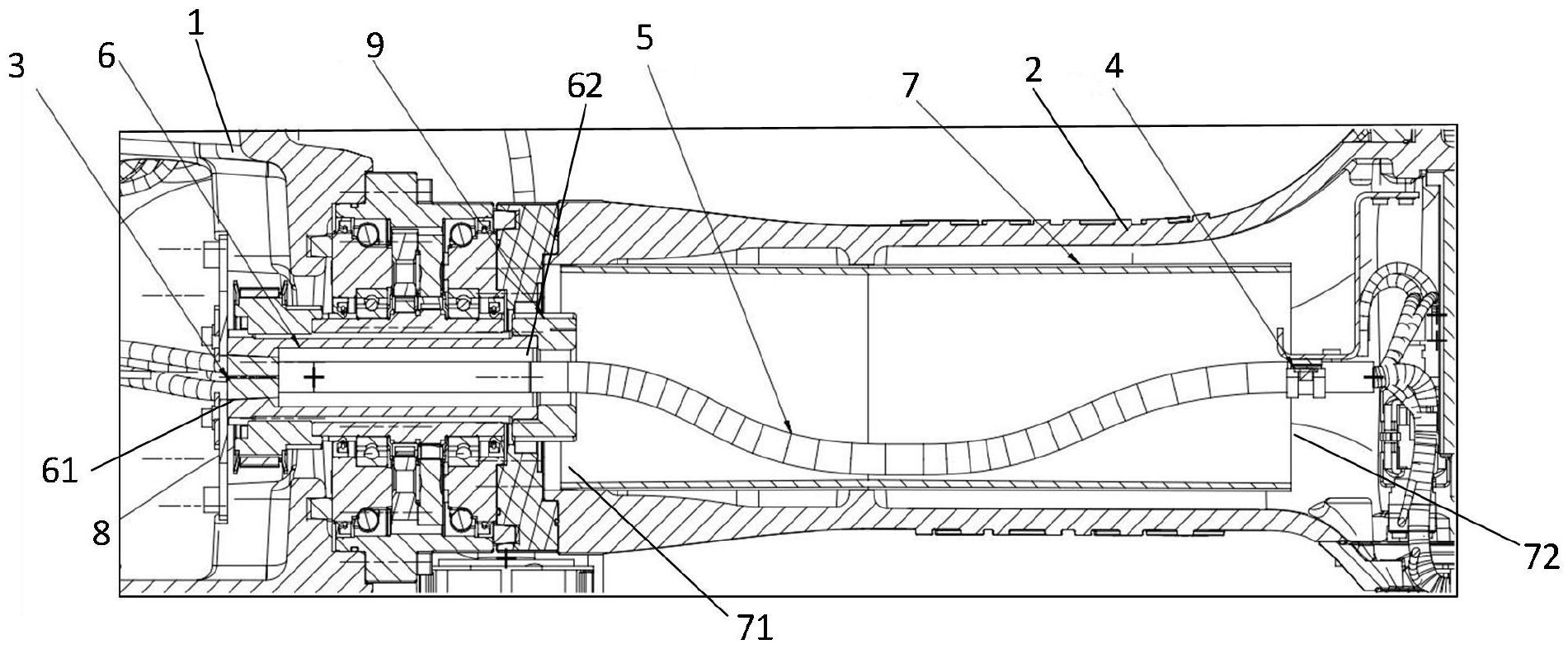
本实用新型提供了一种机器人关节及机器人,机器人关节包括第一部位和第二部位,第一部位与第二部位之间能相对转动;柔性件,与第一部位和第二部位中的一者相连,柔性件内设有贯穿的绳孔;固定件,与述第一部位和第二部位中的另一者相连;线缆,一部分线缆位于柔性件与固定件之间,并且该部分线缆的一端以穿设于绳孔内的形式连接在柔性件上,另一端固定在固定件上,柔性件与固定件之间的线缆的长度大于等于柔性件与固定件之间的距离。该机器人关节通过柔性件固定线缆,线缆在受到应力的情况下该柔性件能释放应力,提升线缆抗应力作用,且通过优化柔性件与固定件之间的线缆的长度,使得线缆在关节中具有长度缓冲,利于提升扭转角度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有