

授权公布号:CN109515834B
一种块状物的抓手
有效
申请
2018-12-06
申请公布
2019-03-26
授权
2021-12-07
预估到期
2038-12-06
| 申请号 | CN201811489910.5 |
| 申请日 | 2018-12-06 |
| 申请公布号 | CN109515834A |
| 申请公布日 | 2019-03-26 |
| 授权公布号 | CN109515834B |
| 授权公告日 | 2021-12-07 |
| 分类号 | B65B35/16;B65B35/36;B65B5/10;B65G47/90 |
| 分类 | 输送;包装;贮存;搬运薄的或细丝状材料; |
| 申请人名称 | 武汉人天包装自动化技术股份有限公司 |
| 申请人地址 | 湖北省武汉市江夏藏龙岛科技工业园 |
专利法律状态
2021-12-07
授权
状态信息
授权
2019-04-19
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B65B35/16;申请日:20181206
2019-03-26
公布
状态信息
公布
摘要
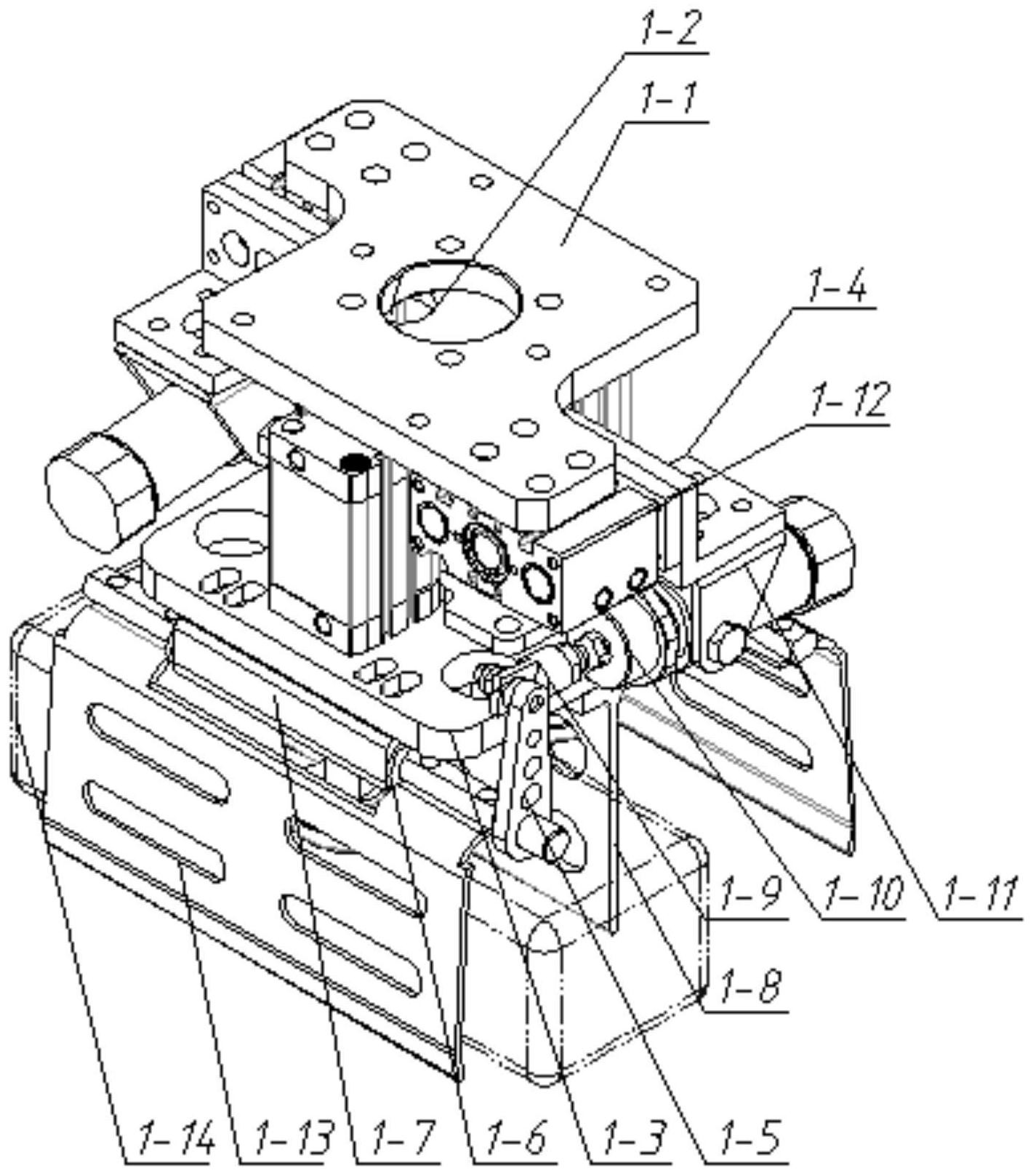
本发明公开了一种块状物的抓手,包括抓手基座板、两个气缸、抓手中隔板和两个抓手侧夹板,两个抓手侧夹板分别设置于抓手基座板的两侧,抓手侧夹板的上端与抓手基座板铰接,两个气缸设于抓手基座板上,两个气缸的活塞杆分别与两个抓手侧夹板连接,抓手中隔板竖直设置于抓手基座板的底部,布置于两个抓手侧夹板之间,两个气缸分别带动抓手侧夹板绕铰接中心转动;抓手中隔板分别与两个抓手侧夹板,形成两个独立空间,即两个装夹工位,用于抓取块状物。实现块状物料单独抓取及两块块状物料的同时夹持,提高了抓取夹持的稳定性,尤其适用于软体块状物的夹持,提高了搬运效率,降低了人工劳动强度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有