

授权公布号:CN216581281U
一种机器人抓手装箱机
有效
申请
2021-10-18
申请公布
1970-01-01
授权
2022-05-24
预估到期
2031-10-18
| 申请号 | CN202122498338.2 |
| 申请日 | 2021-10-18 |
| 授权公布号 | CN216581281U |
| 授权公告日 | 2022-05-24 |
| 分类号 | B65B35/44;B65B35/36;B65B43/24;B65B43/30 |
| 分类 | 输送;包装;贮存;搬运薄的或细丝状材料; |
| 申请人名称 | 武汉人天包装自动化技术股份有限公司 |
| 申请人地址 | 湖北省武汉市江夏藏龙岛科技工业园 |
专利法律状态
2022-05-24
授权
状态信息
授权
摘要
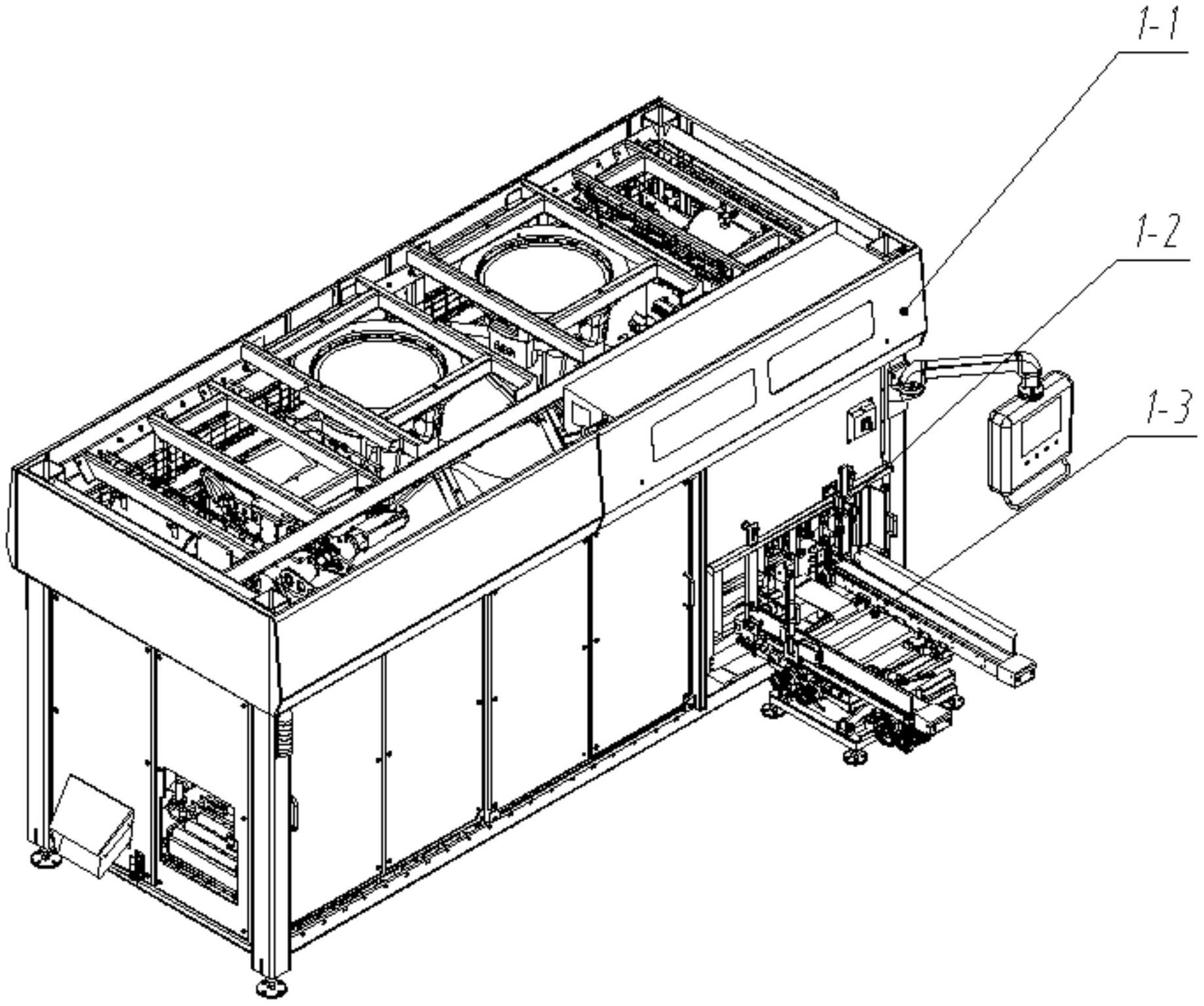
本实用新型公开了一种机器人抓手装箱机,包括箱坯部件、成箱部件、纸箱输送部件、排列机器人抓手、进料输送机、摆盘输送机和装箱机器人抓手,排列机器人抓手布置于进料输送机的输出端和摆盘输送机的输入端上方,排列机器人抓手用于将散乱的物料从进料输送机上抓取到摆盘输送机上进行排列,装箱机器人抓手布置于摆盘输送机的输出端和纸箱输送部件上方,装箱机器人抓手用于将摆盘输送机上的物料抓取到纸箱输送部件上的纸箱内进行装箱,纸箱输送部件的输入端与成箱部件的输出端对接,成箱部件的输入端与箱坯部件的输出端对接。实现物料自动分拣、排列和装箱,减少操作人员和劳动强度,安全性和稳定性高,性价比高,工作效率高,操作简单,占地小。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有