

授权公布号:CN218875504U
一种协作机器人的中空结构
有效
申请
2023-01-16
申请公布
1970-01-01
授权
2023-04-18
预估到期
2033-01-16
| 申请号 | CN202320148100.3 |
| 申请日 | 2023-01-16 |
| 授权公布号 | CN218875504U |
| 授权公告日 | 2023-04-18 |
| 分类号 | B25J18/00;B25J17/00;B25J17/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 伯朗特机器人股份有限公司 |
| 申请人地址 | 广东省东莞市大朗镇沙步村沙富路83号 |
专利法律状态
2023-04-18
授权
状态信息
授权
摘要
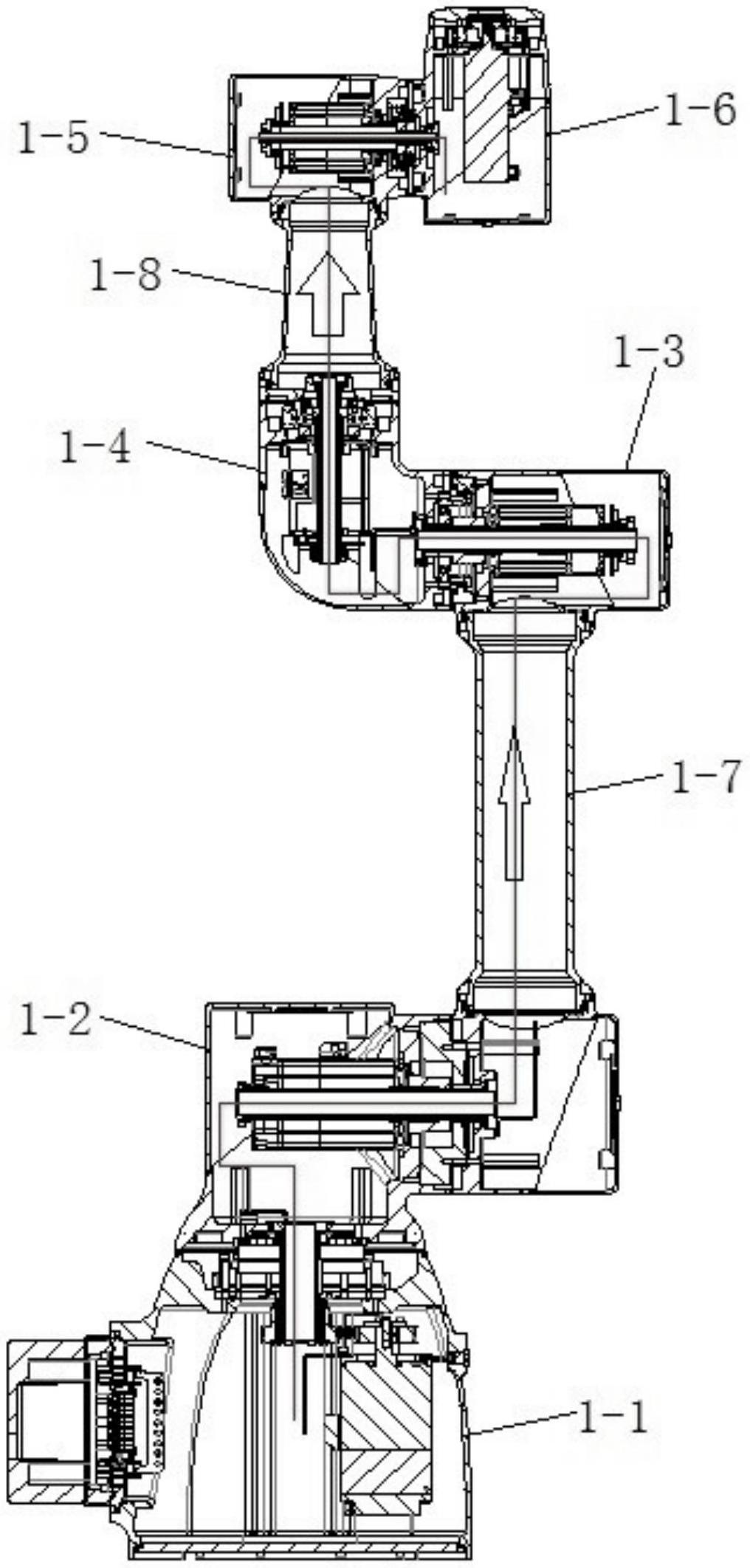
本实用新型公开一种协作机器人的中空结构,包括依次连接的一轴装配体、二轴装配体、大臂、三轴装配体、四轴装配体、小臂、五轴装配体、六轴装配体;一轴装配体包括底座、伺服电机、中空减速机、一轴过线管,中空减速机连接于伺服电机的输出端,二轴装配体包括转座、第一中空伺服电机、第一谐波减速机、二轴过线管、第一电机转接轴,一轴过线管固定在转座上且一端穿过中空减速机伸入底座内,第一电机转接轴的一端连接于第一中空伺服电机的输出轴上,第一谐波减速机的波发生器固定在第一电机转接轴上;二轴过线管的一端穿过第一中空伺服电机的输出轴,另一端穿过第一电机转接轴;三轴装配体、四轴装配体、五轴装配体均采用相同的中空过线结构。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有