

授权公布号:CN114179129B
一种机器人辅助支撑装置的设置方法
有效
申请
2021-12-30
申请公布
2022-03-15
授权
2024-03-22
预估到期
2041-12-30
| 申请号 | CN202111658053.9 |
| 申请日 | 2021-12-30 |
| 申请公布号 | CN114179129A |
| 申请公布日 | 2022-03-15 |
| 授权公布号 | CN114179129B |
| 授权公告日 | 2024-03-22 |
| 分类号 | B25J19/00;B25J9/00;B25J9/12 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 伯朗特机器人股份有限公司 |
| 申请人地址 | 广东省东莞市大朗镇沙步村沙富路83号 |
专利法律状态
2024-03-22
授权
状态信息
授权
2022-04-01
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J19/00;申请日:20211230
2022-03-15
公布
状态信息
公布
摘要
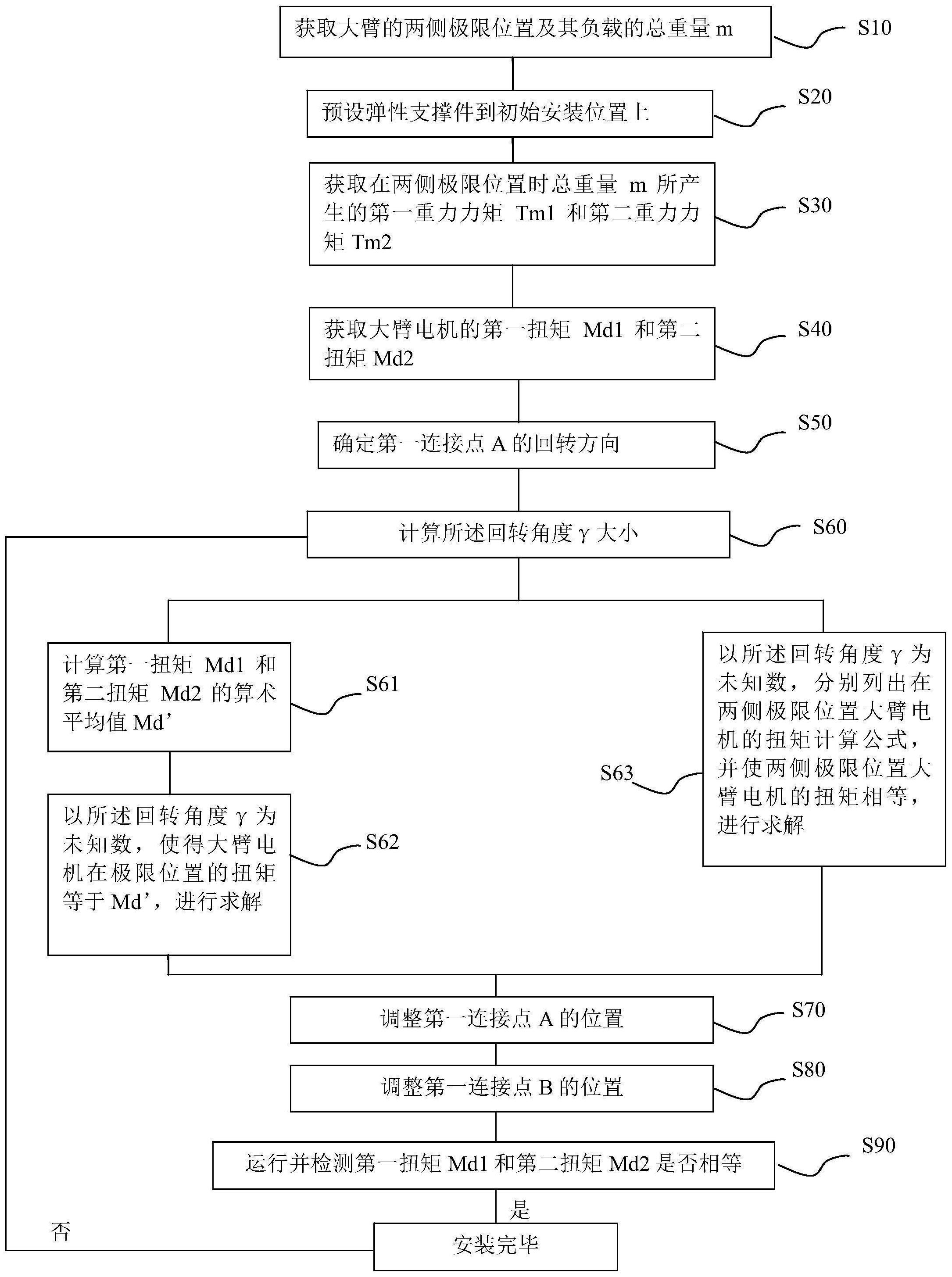
一种机器人辅助支撑装置的设置方法,包括:设置机器人;获取第一极限位置与第二极限位置和总重量;预设包括弹性支撑件的辅助支撑装置,使得弹性支撑件一端与大臂安装座铰接,另一端与大臂铰接;分别计算总重量的第一重力力矩和第二重力力矩;获取调整前大臂电机在第一极限位置的第一扭矩和第二极限位置的第二扭矩;比较第一扭矩和第二扭矩大小以确定回转方向;将弹性支撑件与大臂安装座铰接处绕所述大臂回转轴回转,使其位于靠近第一扭矩或第二扭矩中值较大一侧的第一极限位置或第二极限位置。与现有技术相比较,本发明的机器人能减少单侧大臂电机扭矩过大的情况,降低大臂电机整体所需的扭矩,降低大臂电机的成本和体积。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有