

授权公布号:CN113809689B
一种工业机器人关节间内部布线方法
有效
申请
2021-11-01
申请公布
2021-12-17
授权
2023-03-21
预估到期
2041-11-01
| 申请号 | CN202111281168.0 |
| 申请日 | 2021-11-01 |
| 申请公布号 | CN113809689A |
| 申请公布日 | 2021-12-17 |
| 授权公布号 | CN113809689B |
| 授权公告日 | 2023-03-21 |
| 分类号 | H02G1/06;H02G3/04 |
| 分类 | 发电、变电或配电; |
| 申请人名称 | 伯朗特机器人股份有限公司 |
| 申请人地址 | 广东省东莞市大朗镇沙步村沙富路83号 |
专利法律状态
2023-03-21
授权
状态信息
授权
2021-12-17
公布
状态信息
公布
摘要
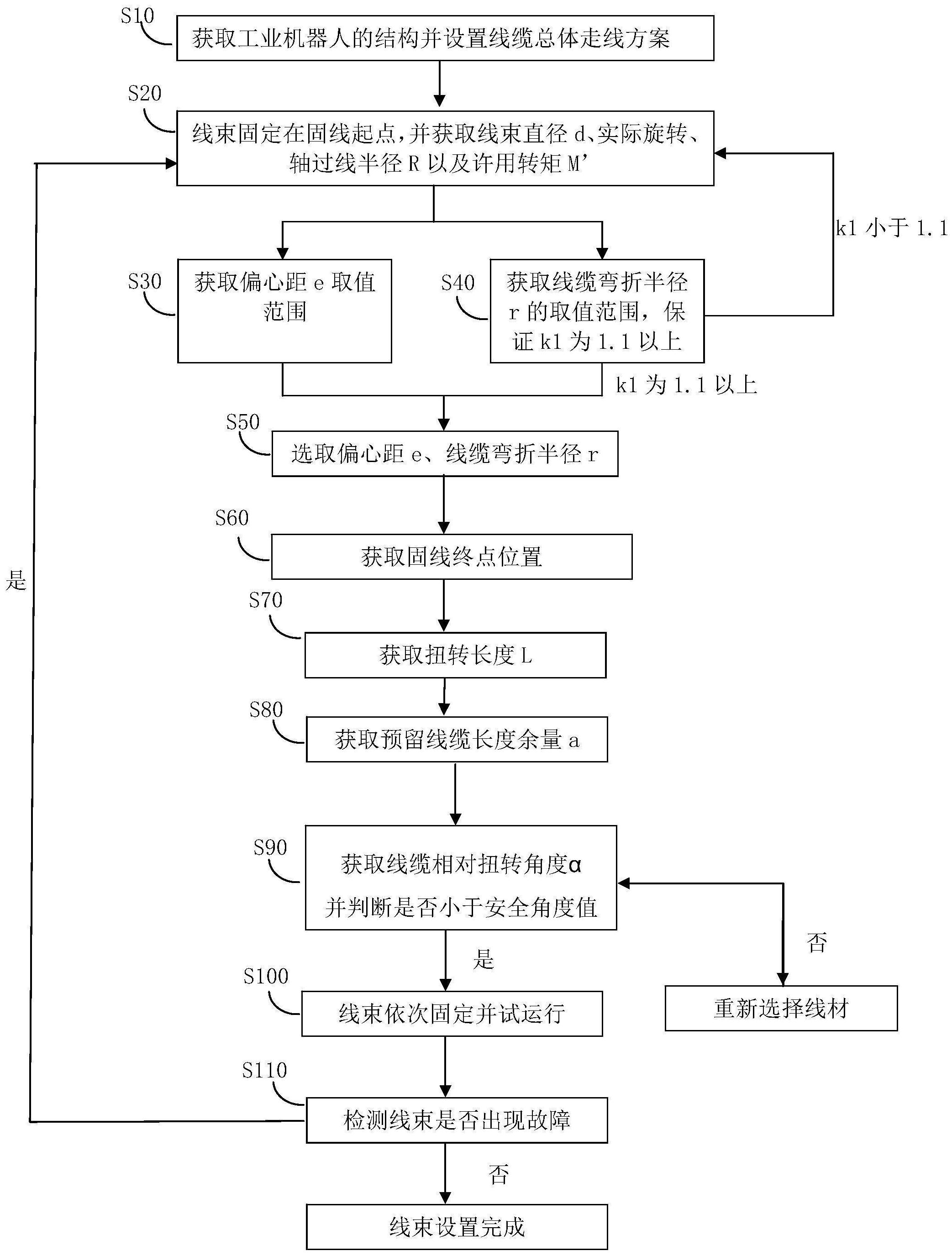
一种工业机器人关节间内部布线方法,包括以下步骤:获取工业机器人的结构;线束弯曲进入过线通道形成第一弯曲圆弧;获取线束直径d和实际过线直径D;计算获取偏心距e的取值范围;计算获取线缆弯折半径r的取值范围;选取偏心距e和线缆弯折半径r的值并弯曲线束以形成第二弯曲圆弧;设置与第二弯曲圆弧轴线相切并指向下一关节的切线,线束沿切线延伸,调整切线与过线通道轴线之间的夹角,使得线束从第二弯曲圆弧延伸至下一关节时,其外侧与关节内的其他零部件具有间隙;固定线束。与现有技术相比较,本发明的工业机器人关节间内部布线方法能提高布线效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有