

授权公布号:CN111409107B
工业机器人摆动偏差性能测试方法
有效
申请
2020-03-30
申请公布
2020-07-14
授权
2023-03-17
预估到期
2040-03-30
| 申请号 | CN202010236387.6 |
| 申请日 | 2020-03-30 |
| 申请公布号 | CN111409107A |
| 申请公布日 | 2020-07-14 |
| 授权公布号 | CN111409107B |
| 授权公告日 | 2023-03-17 |
| 分类号 | B25J19/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 伯朗特机器人股份有限公司 |
| 申请人地址 | 广东省东莞市大朗镇沙步村沙富路83号 |
专利法律状态
2023-03-17
授权
状态信息
授权
2020-07-14
公布
状态信息
公布
摘要
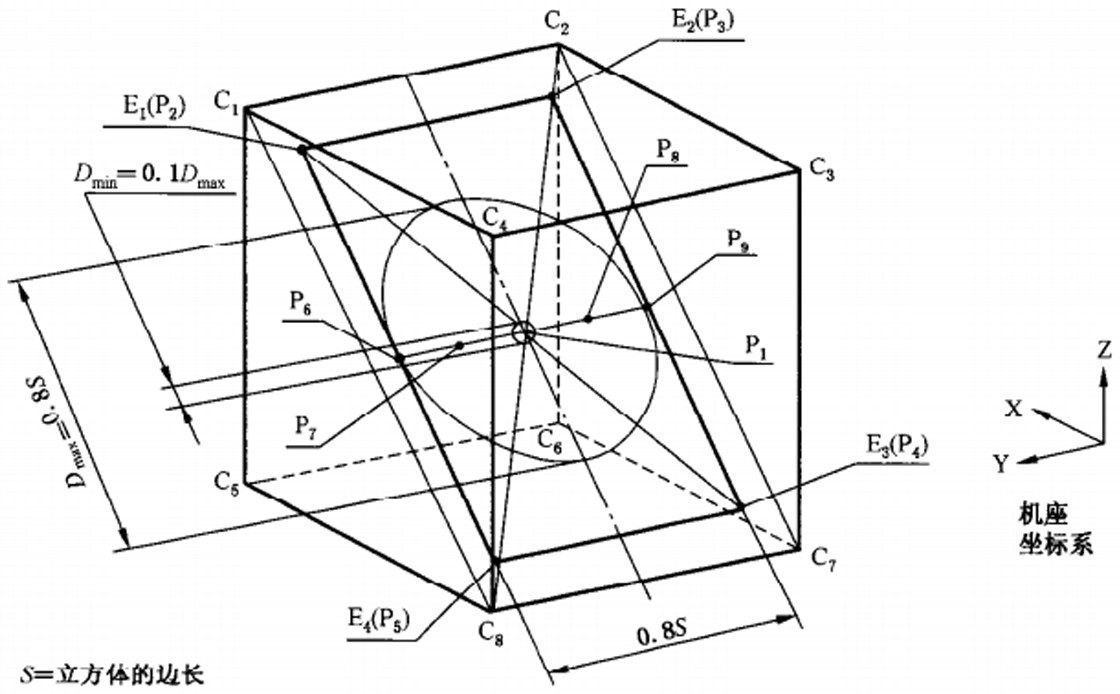
本发明涉及机器人摆动偏差性能指标测试领域,尤其为一种工业机器人摆动偏差性能测试方法,先完成三维空间测量仪坐标系与机器人坐标系的坐标转换,根据SVD法(奇异值分解法)算出旋转矩阵、平移矩阵,根据机器人的工作空间,给定指令摆幅、以指令摆频完成的摆动距离,机器人摆幅误差功能测试由测得的实到摆幅平均值与指令摆幅之间的偏差计算而得;机器人摆频误差功能测试由测得的实际摆频与指令摆频之间的偏差来计算而得。本发明,专门用于机器人的测量系统价使用和维护成本低,且测量的机理清楚。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有