

授权公布号:CN114571465B
一种基于模拟退火算法的四轴并联机器人校准方法
有效
申请
2022-03-31
申请公布
2022-06-03
授权
2023-08-22
预估到期
2042-03-31
| 申请号 | CN202210345310.1 |
| 申请日 | 2022-03-31 |
| 申请公布号 | CN114571465A |
| 申请公布日 | 2022-06-03 |
| 授权公布号 | CN114571465B |
| 授权公告日 | 2023-08-22 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 伯朗特机器人股份有限公司 |
| 申请人地址 | 广东省东莞市大朗镇沙步村沙富路83号 |
专利法律状态
2023-08-22
授权
状态信息
授权
2022-06-03
公布
状态信息
公布
摘要
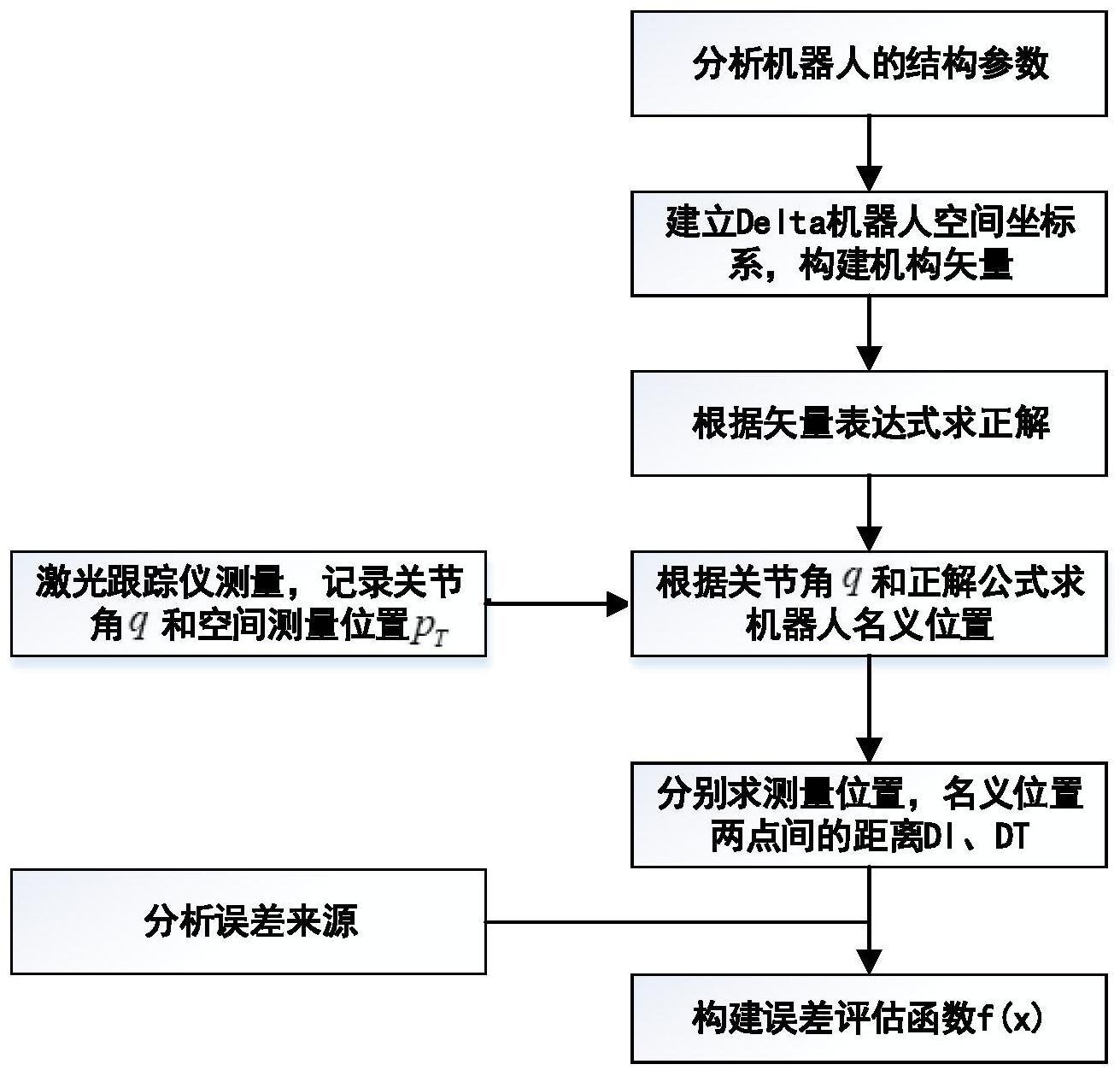
本发明涉及一种基于模拟退火算法的四轴Delta并联机器人校准方法,其首先求取机器人的正解,然后充分考虑各支链的长度差异、动静平台的误差、零点差异、工具坐标误差,从而抽象出了多个重要参数,接着使用激光跟踪仪器采样机器人工作空间位置及对应的关节角,使用任意两点间的距离构建评估函数,基于该评估函数,使用模拟退火方法求取最优解,获取最佳校准参数,提高了机器人控制精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有