

授权公布号:CN114589692B
一种机器人零点标定方法及其标定设备
有效
申请
2022-02-25
申请公布
2022-06-07
授权
2024-03-26
预估到期
2042-02-25
| 申请号 | CN202210182967.0 |
| 申请日 | 2022-02-25 |
| 申请公布号 | CN114589692A |
| 申请公布日 | 2022-06-07 |
| 授权公布号 | CN114589692B |
| 授权公告日 | 2024-03-26 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 埃夫特智能装备股份有限公司 |
| 申请人地址 | 安徽省芜湖市中国(安徽)自由贸易试验区芜湖片区万春东路96号 |
专利法律状态
2024-03-26
授权
状态信息
授权
2022-06-07
公布
状态信息
公布
摘要
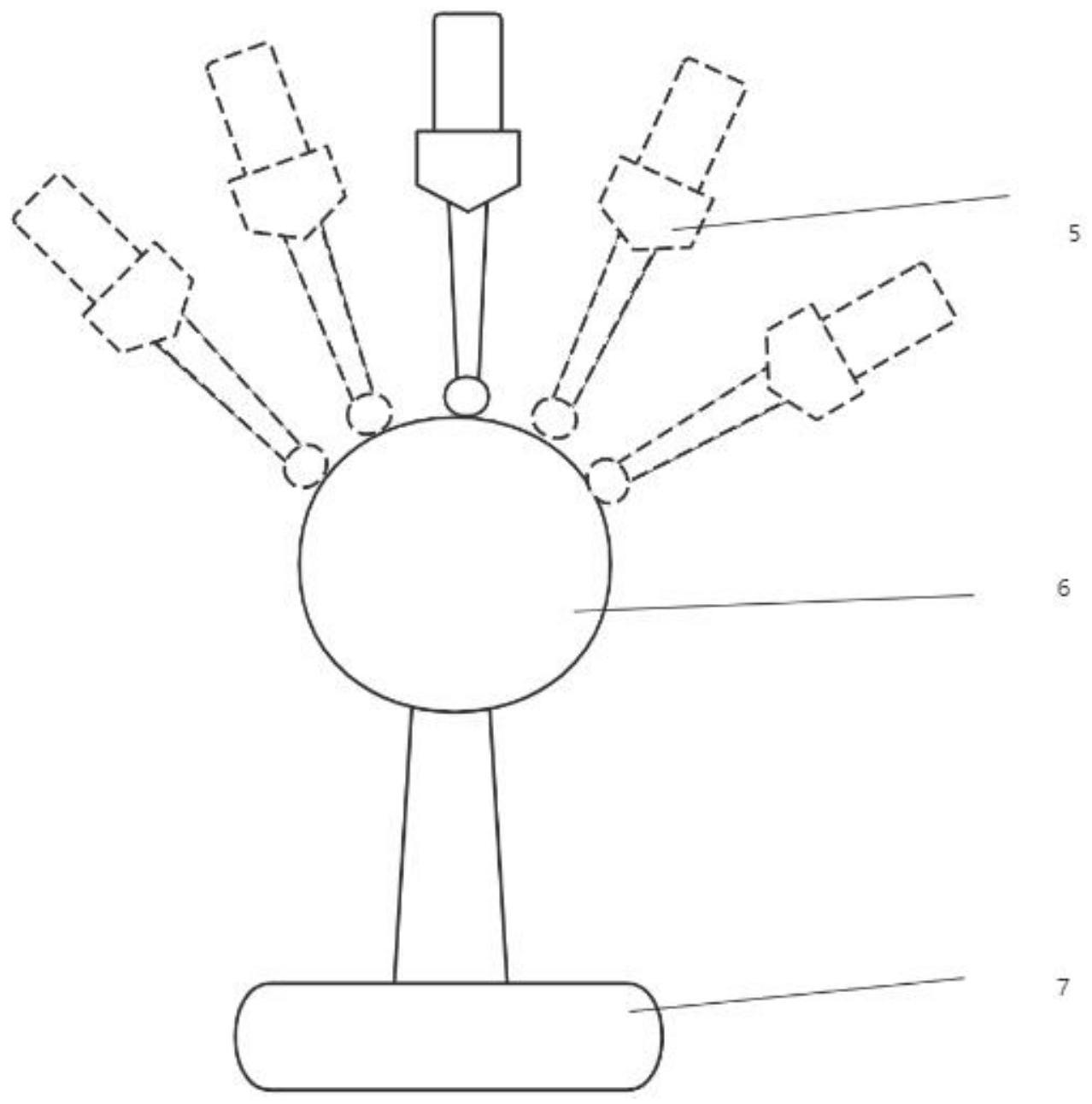
本发明涉及汽车部件模具领域,具体是一种机器人零点标定方法及其标定设备,该方法具体步骤如下:S1、机器人接触标准球;S2、检测IO信号;S3、探针接触标准球;S4、求出Pc和r;S5、红宝石移动;S6、不同的姿态去接触标准球;S7、求出标准球的球心位置Pb;S8、第一个姿态下;S9、求出Pt;S10、建立标准球坐标系;S11、Rf和Pf相对于姿态和位置;S12、红宝石中心与标准球球心的距离;S13、零点偏差修正;包括标准球、支架、探针,将探针安装在机器人上,并操作机器人使得探针以同一个姿态接触标准球的5个位置,接着换一种姿态去接触标准球的5个位置,重复此操作20次,最后基于最小二乘算法以及球面约束,求出各关节的零点偏差,精准度高。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有