

授权公布号:CN106984465B
一种喷涂机器人用多工位转台
有效
申请
2017-05-03
申请公布
2017-07-28
授权
2024-02-27
预估到期
2037-05-03
| 申请号 | CN201710304016.5 |
| 申请日 | 2017-05-03 |
| 申请公布号 | CN106984465A |
| 申请公布日 | 2017-07-28 |
| 授权公布号 | CN106984465B |
| 授权公告日 | 2024-02-27 |
| 分类号 | B05B13/02 |
| 分类 | 一般喷射或雾化;对表面涂覆液体或其他流体的一般方法〔2〕; |
| 申请人名称 | 埃夫特智能装备股份有限公司 |
| 申请人地址 | 安徽省芜湖市鸠江经济开发区万春东路96号 |
专利法律状态
2024-02-27
授权
状态信息
授权
2017-08-22
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B05B13/02;申请日:20170503
2017-07-28
公布
状态信息
公布
摘要
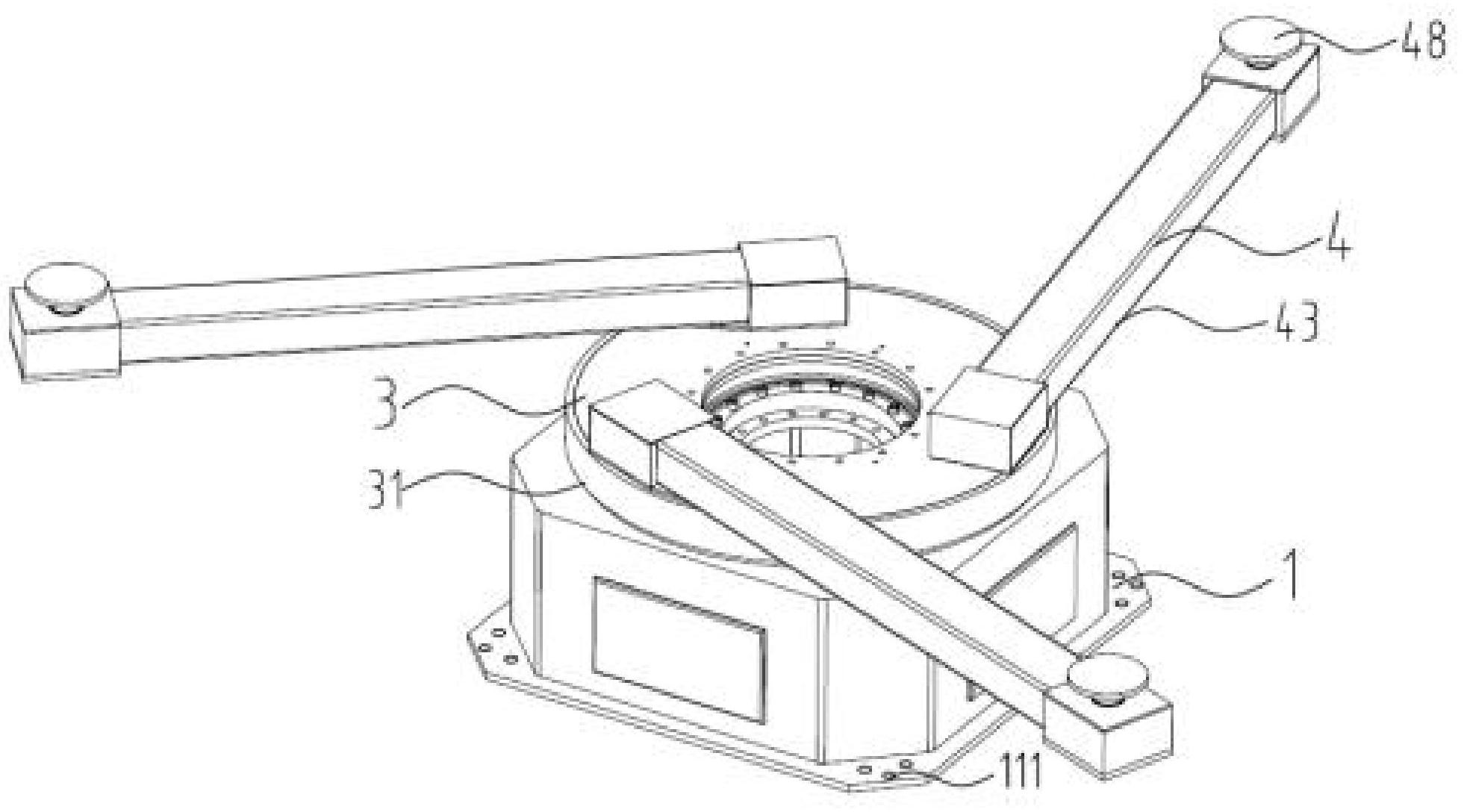
本发明涉及一种喷涂机器人用多工位转台,包括底座部分、手爪驱动部分、旋转体部分、手爪部分;手爪驱动部分位于底座部分左部,旋转体部分位于底座部分上端面,手爪部分位于旋转体部分上端面。本发明的利用偏心装置调节齿轮啮合间隙的方式,能够很好的保证转台的工作精度,并且操作简单。本发明的电机、减速机、离合器组合工作的方式,由于依靠气动离合器来传导电机输出力矩,不仅运动过程平稳,还可以大幅的提高转台的负载能力,降低设备制造成本,提高工作效率。本发明还具有工作精度高、工作稳定可靠、结构紧凑、操作维护便捷、安全性高等优点。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有