

授权公布号:CN112123367B
一种机器人手腕构造及机器人
有效
申请
2020-09-12
申请公布
2020-12-25
授权
2023-12-15
预估到期
2040-09-12
| 申请号 | CN202010956977.6 |
| 申请日 | 2020-09-12 |
| 申请公布号 | CN112123367A |
| 申请公布日 | 2020-12-25 |
| 授权公布号 | CN112123367B |
| 授权公告日 | 2023-12-15 |
| 分类号 | B25J17/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 埃夫特智能装备股份有限公司 |
| 申请人地址 | 安徽省芜湖市鸠江经济开发区万春东路96号 |
专利法律状态
2023-12-15
授权
状态信息
授权
2021-01-12
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J17/02;申请日:20200912
2020-12-25
公布
状态信息
公布
摘要
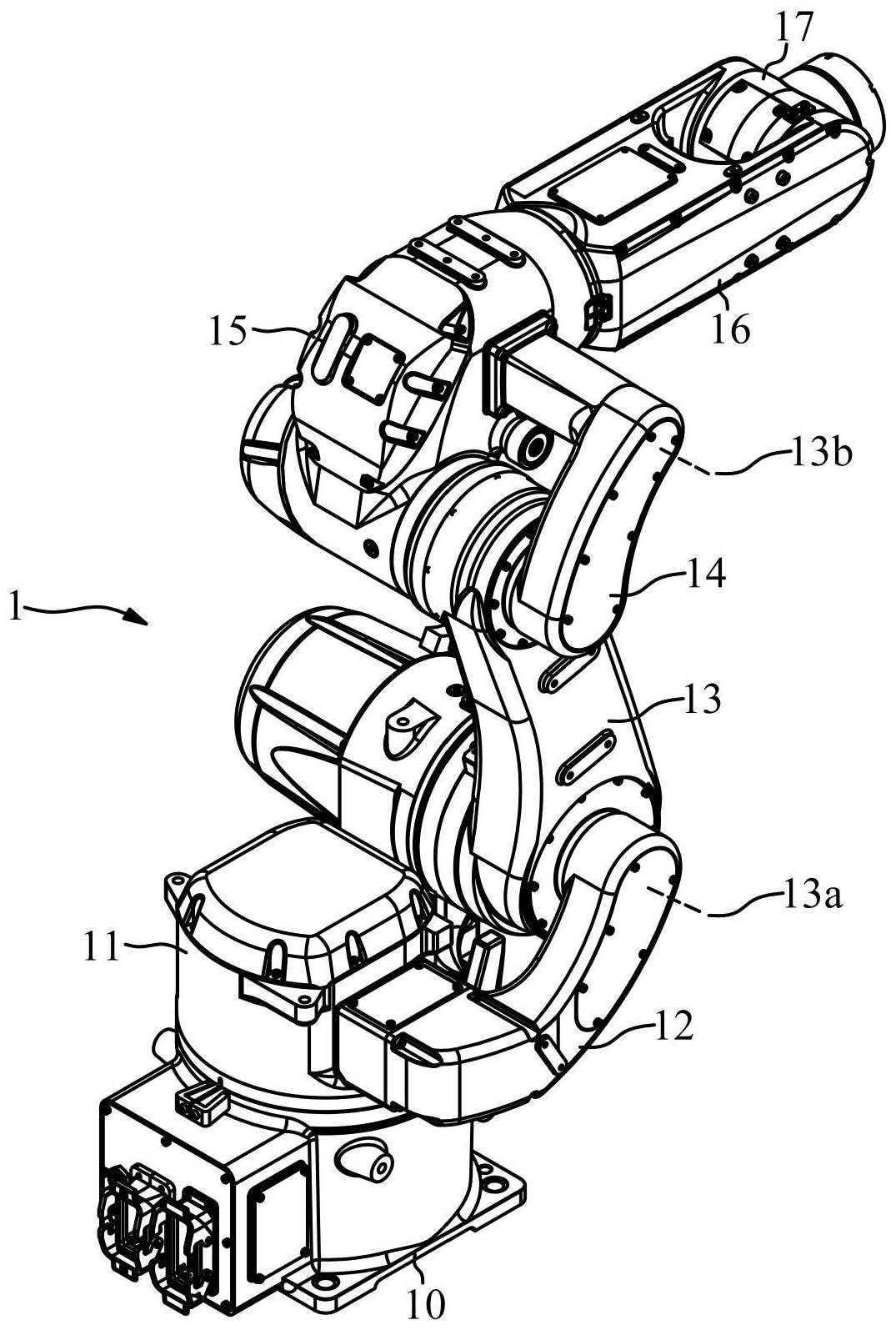
本发明涉及一种机器人设备技术领域,具体是一种机器人手腕构造,包括第一手腕构件、第二手腕构件,还包括:伺服电机,安装在第一手腕构件内;减速机,输出侧用于驱动第二手腕构件旋转;输入齿轮,安装在伺服电机的输出轴上;惰轮,以旋转的方式安装在第一手腕构件上;输出齿轮,安装在减速机上;所述的惰轮以惰轮与输出齿轮的中心距为半径、以输出齿轮的轴线为圆心进行摆动;移动机构,带动伺服电机径向移动,调整输入齿轮与输出齿轮之间的距离;通过移动机构来调整输入齿轮与惰轮的间隙,以改变惰轮的受力方向来达到延长齿轮的寿命,有效的控制齿轮传动精度,同时应用该手腕结构的机器人可有效的提升轨迹精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有