

授权公布号:CN217530903U
一种工业机器人的电缆走线结构
有效
申请
2022-02-24
申请公布
1970-01-01
授权
2022-10-04
预估到期
2032-02-24
| 申请号 | CN202220392127.2 |
| 申请日 | 2022-02-24 |
| 授权公布号 | CN217530903U |
| 授权公告日 | 2022-10-04 |
| 分类号 | B25J19/00;B25J17/00;B25J17/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 埃夫特智能装备股份有限公司 |
| 申请人地址 | 安徽省芜湖市中国(安徽)自由贸易试验区芜湖片区万春东路96号 |
专利法律状态
2022-10-04
授权
状态信息
授权
摘要
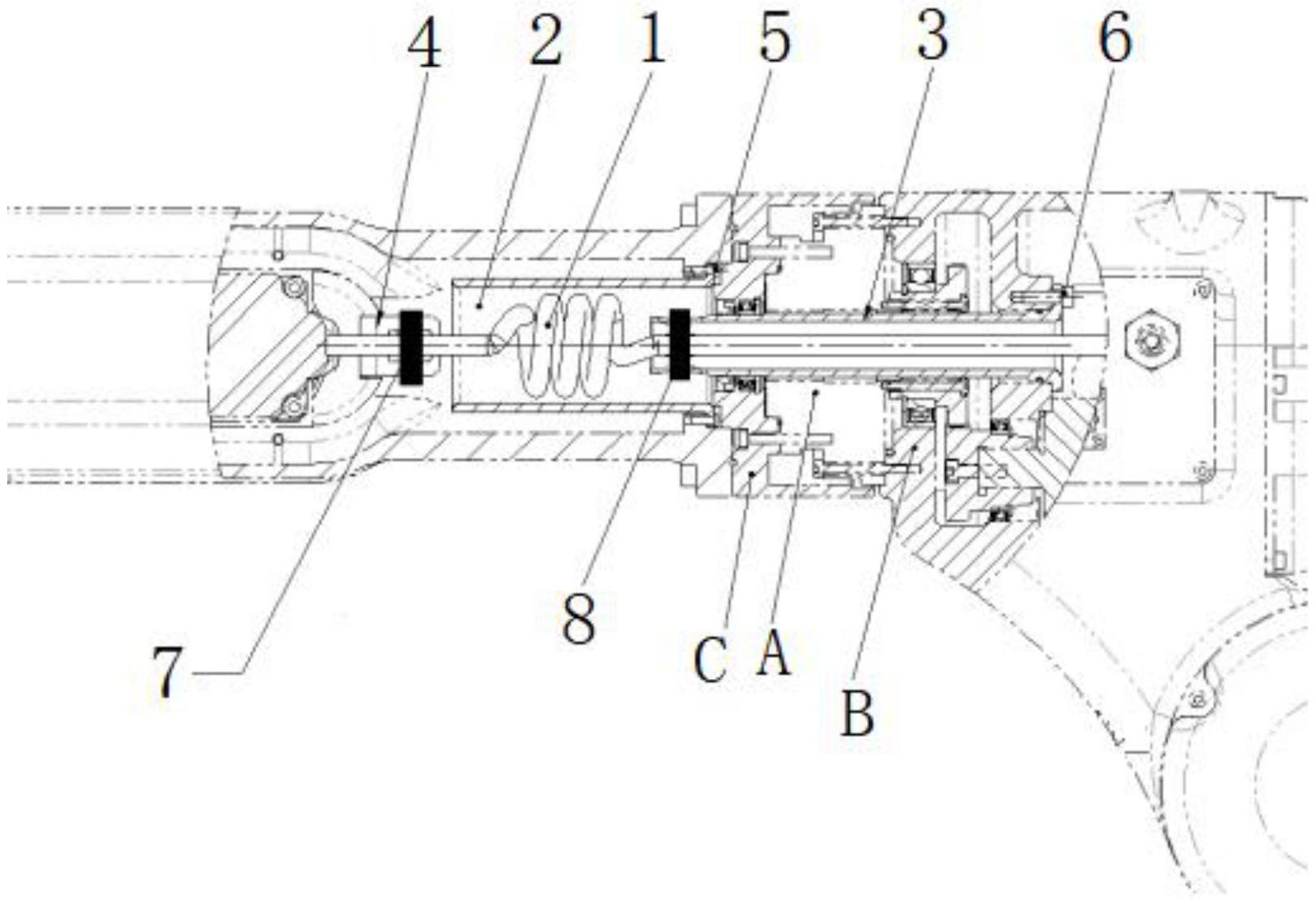
本实用新型涉及工业机器人技术领域,具体为一种工业机器人的电缆走线结构,包括扭转关节固定侧、扭转关节活动侧,还包括:耐磨套;过线套;螺旋电缆,主体呈螺旋状结构,置于耐磨套内部,螺旋电缆一端穿过扭转关节活动侧、另一端通过过线套的内孔穿过扭转关节固定侧,且通过固定钣金在扭转关节活动侧、过线套的端部处形成固定螺旋电缆两端的固定点一、固定点二。本实用新型通过采用螺旋结构电缆的使用,可有效减小扭转关节作扭转动作时,该部分电缆的受扭转力的情况,可实现扭转关节以更大角度的扭转动作范围;可有效避免工业机器人扭转关节处电缆屏蔽及线缆线芯的损坏;同时避免由于线束受扭转力作用,导致线缆接头处发生接触不良的情况。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有