

授权公布号:CN109291039B
一种四关节平面机器人
有效
申请
2018-11-30
申请公布
2019-02-01
授权
2023-12-19
预估到期
2038-11-30
| 申请号 | CN201811455655.2 |
| 申请日 | 2018-11-30 |
| 申请公布号 | CN109291039A |
| 申请公布日 | 2019-02-01 |
| 授权公布号 | CN109291039B |
| 授权公告日 | 2023-12-19 |
| 分类号 | B25J9/06 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 埃夫特智能装备股份有限公司 |
| 申请人地址 | 安徽省芜湖市鸠江经济开发区万春东路96号 |
专利法律状态
2023-12-19
授权
状态信息
授权
2019-03-01
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/06;申请日:20181130
2019-02-01
公布
状态信息
公布
摘要
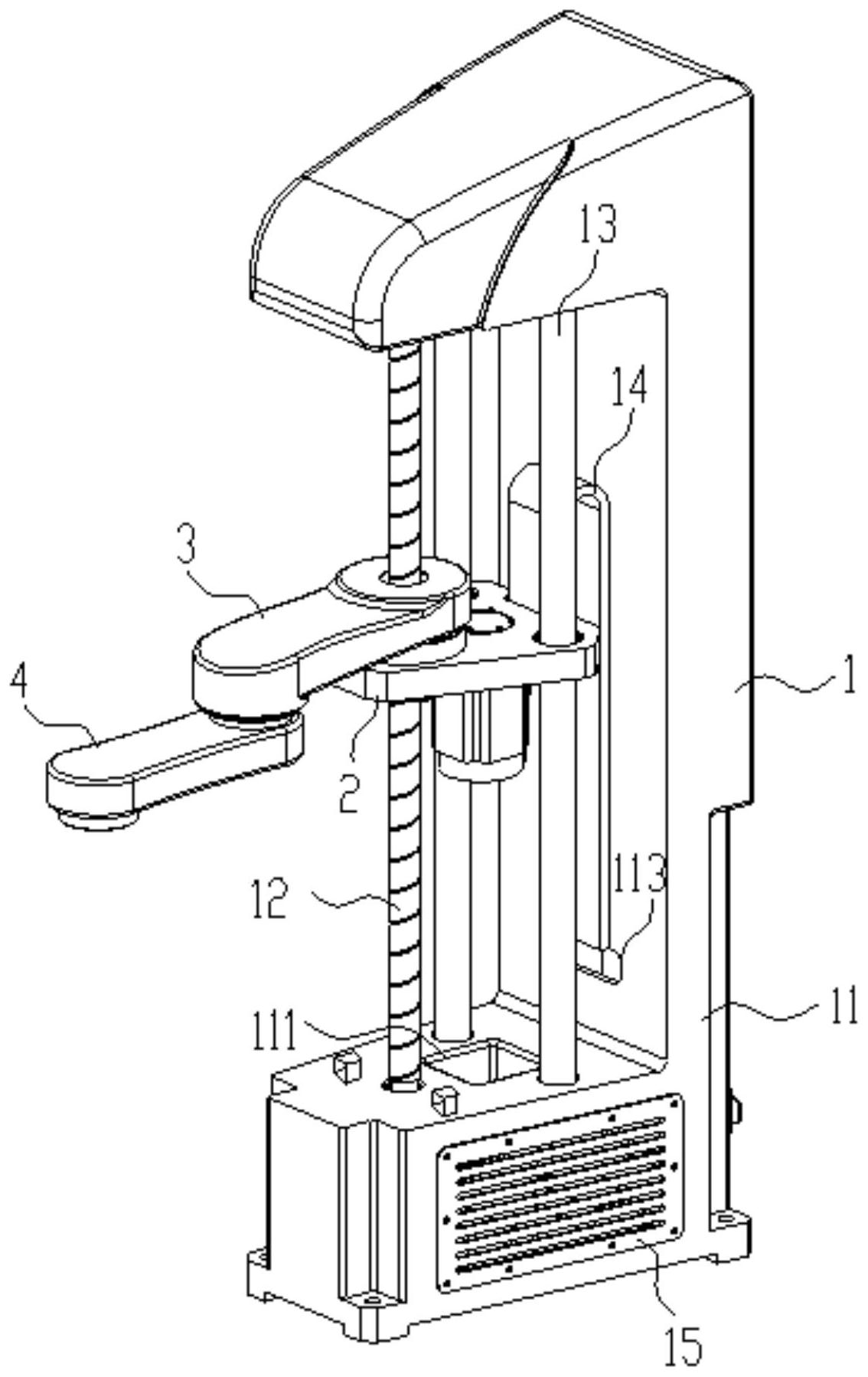
本发明涉及一种四关节平面机器人,包括第一关节部、第二关节部、第三关节部、第四关节部,第一关节部包括底座,底座的前端设有滚珠丝杠、后端设有对称布置的辅助固定柱,底座的外壁上设有塑料拖链;第二关节部包括升降座、中空减速机和电机,升降座的一端贯穿滚珠丝杠且安装于滚珠丝杠的丝杠螺母,升降座的另一端贯穿辅助固定柱,中空减速机上安装有输出带轮,电机上安装有输入带轮,输出带轮和输入带轮通过同步带传递扭矩,升降座上设有密封盖板。本发明利用滚珠丝杠与辅助支撑柱之间的位置和结构关系实现机器人的上下直线运动和提高运动刚性,实现第三关节部绕滚珠丝杠轴线转动,有效扩大机器人的运动范围和降低转动惯量。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有