

授权公布号:CN110149104B
一种机器人零相移实时滤波方法
有效
申请
2019-04-23
申请公布
2019-08-20
授权
2023-08-04
预估到期
2039-04-23
| 申请号 | CN201910329410.3 |
| 申请日 | 2019-04-23 |
| 申请公布号 | CN110149104A |
| 申请公布日 | 2019-08-20 |
| 授权公布号 | CN110149104B |
| 授权公告日 | 2023-08-04 |
| 分类号 | H03H17/00;H03H17/02 |
| 分类 | 基本电子电路; |
| 申请人名称 | 埃夫特智能装备股份有限公司 |
| 申请人地址 | 安徽省芜湖市鸠江经济开发区万春东路96号 |
专利法律状态
2023-08-04
授权
状态信息
授权
2019-09-13
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):H03H17/00;申请日:20190423
2019-08-20
公布
状态信息
公布
摘要
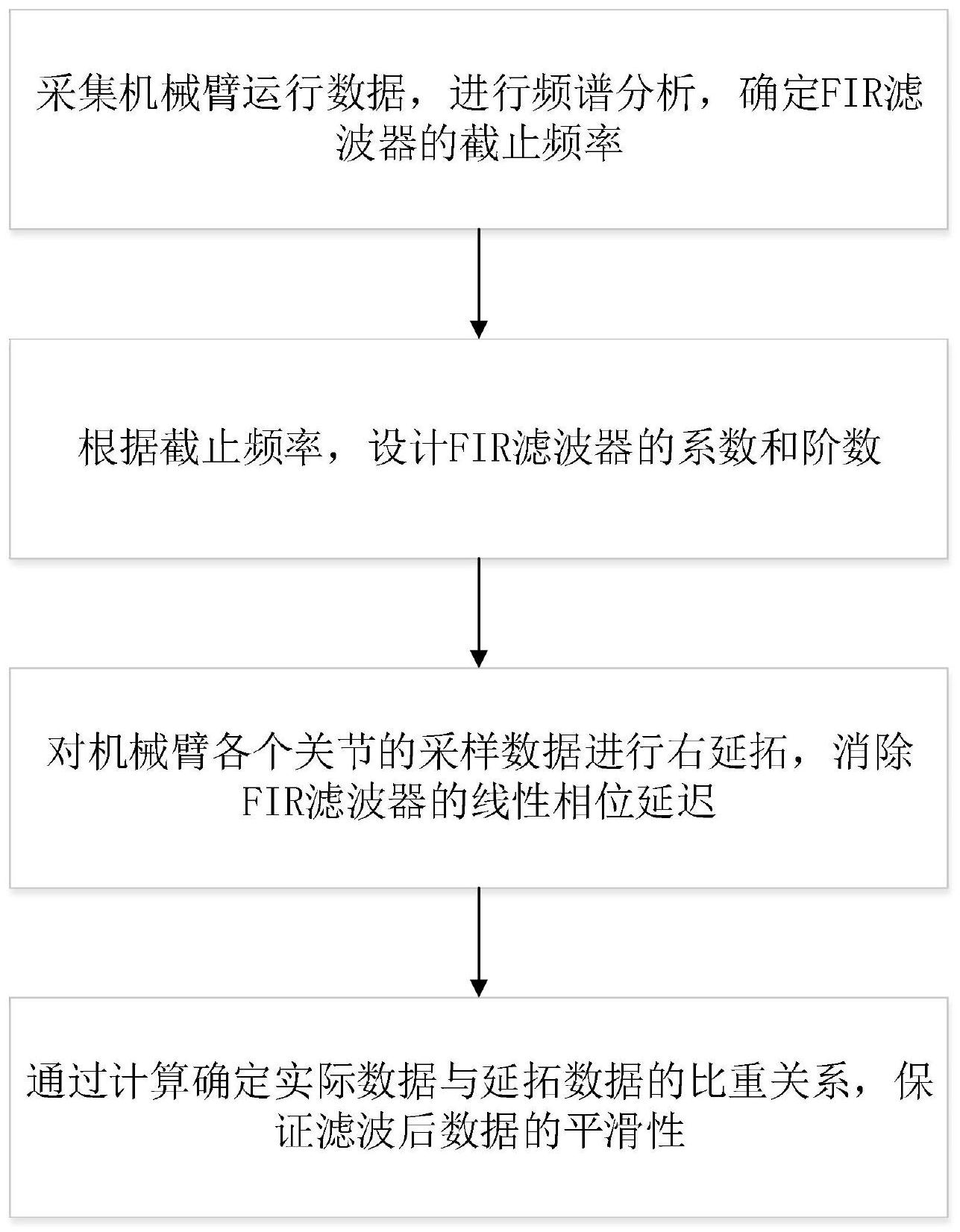
本发明涉及工业机器人数字信号处理系统中的滤波器领域,具体是一种机器人零相移实时滤波方法,其具体步骤如下:S1:采集数据,分析频率;S2:设计FIR滤波器系数和阶数;S3:计算滤波数据;S4:确定实际数据与延拓数据比重关系;本发明充分利用FIR滤波器的线性相位性质,在滤波时不会产生频谱混叠,剔除噪声干扰的同时,又尽可能的保留了实际数据,减少了人工记录可能出现错误的可能;由于滤波后的数据不会有相位滞后,在实际人机协作过程中,如果发生碰撞,信号会在当前时刻发生变化,可以使机器人立马启动安全措施,不会对人造成进一步的伤害,提高了使用者的安全性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有